

Какова жесткость системы из двух пружин
Определение жесткости системы пружин.
Если пружины соединены параллельно, то деформация всех пружин одинакова и равна λ (рис.2а), нагрузка же, действующая на каждую из пружин, различна: на первую пружину действует сила P1, на вторую P2, и т.д., причем P1+P2+…+Pn=P.
Поэтому 
Или  т.е. жесткость системы параллельно соединенных пружин Kc равна сумме жесткостей Ki отдельных пружин.
т.е. жесткость системы параллельно соединенных пружин Kc равна сумме жесткостей Ki отдельных пружин.
При последовательном соединении пружин (рис.2б) одинаковой для всех пружин является сила нагрузки P, а общая деформация λ складывается из
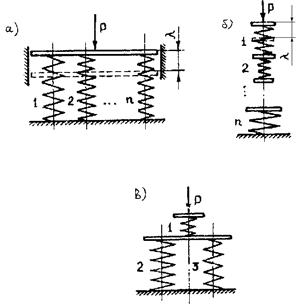 деформаций λ1, λ2,… ,λn, составляющих пружин.
деформаций λ1, λ2,… ,λn, составляющих пружин.

или 

Отсюда следует, что жесткость системы параллельно соединенных пружин больше жесткостей отдельных пружин, входящих в систему, а жесткость системы последовательно соединенных пружин, наоборот, меньше жесткостей пружин, составляющих эту систему.
Для определения внутренних силовых факторов в витке рассмотрим сечение пружины ( Рис.3).
При растяжении (или сжатии) винтовой цилиндрической пружины в любом поперечном сечении витка возникают крутящий и изгибающий моменты, поперечная и нормальная силы, но при малом угле подъёма винтовой оси проволоки напряжения и перемещения, вызываемые продольной силой и изгибающим моментом малы, и поэтому не учитываются.
Рассечем пружину плоскостью, перпендикулярной ее оси и рассмотрим равновесия отсеченной части пружины,
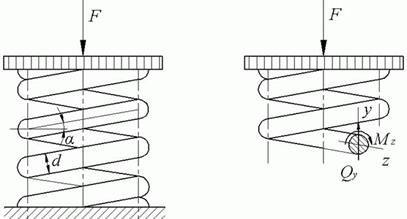
Из условия статического равновесия находим, что в поперечных сечениях пружины действуют внутренние силовые факторы в виде поперечного усилия Q=P и крутящего момента MKp=PDcp/2.
От действия усилия Q в поперечном сечении витка пружин возникают касательные напряжения сдвига (рис. 4а), которые равномерно распределены по сечению, площадью А. От действия крутящего момента MKp возникают касательные напряжения кручения (рис. 4б), суммируя напряжения, получаем эпюру суммарных напряжений (рис. 4в).
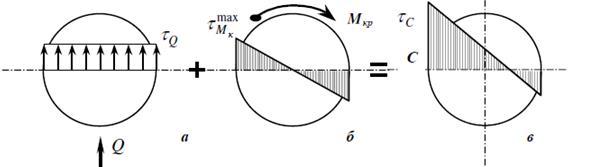

где τ1 – касательные напряжения сдвига
τ2 – касательные напряжения кручения
 ,
,
 ,
,
где Wp – полярный момент сопротивления сечения при кручении

Диаметр проволоки значительно меньше двух средних диаметров витка пружины, поэтому можно принять
Изменение продольных размеров (осадку) λ удобно определить энергетическим методом, приравнивая работу А приложенной силы Р и потенциальной энергии деформации U пружины. Работа внешних сил
 .
.
Потенциальная энергия накапливается, в основном, за счет кручения прутка и поэтому может быть определена

Учитывая, что крутящий Мк=PD/2 и момент инерции Ip=πd4/32 по длине проволоки не изменяются, а длина проволоки l = πdn, получаем

Приравнивая A и U, находим


Таким образом, при определении напряжений и перемещений в цилиндрических пружинах учитывают только действие крутящего момента.
Основными материалами пружин являются высокопрочная специальная пружинная проволока I, II и III классов диаметром 0,2. 5 мм, а также высокоуглеродистые стали 65, 70, марганцовистая сталь 65Г, кремнистая сталь 60С2А, хромованадиевая сталь 50ХФА и др.
Пружины, предназначенные для работы в химически активной среде, изготовляют из фосфористых БрОФ 6-0,15, БрОФ 4-0,2 и бериллиевой БрБ2 бронз.
3. УСТРОЙСТВО И ПРИНЦИП РАБОТЫ
Внешний вид установки представлен на рис. 5. В состав установки входят:
силовая рама с основанием (6) и (9), элементами горизонтирования (10), кронштейнами (11) и двумя траверсами, выполненных в виде подвижной и неподвижной планок (5);нагрузочные устройства с двумя подвесами (7) и наборами съемных грузов (8);две витые цилиндрические пружины сжатия (1);
два индикатора часового типа (2), указатели (3) и стандартная измерительная линейка (4).
Сжимающая сила создается при помощи съемных грузов. Масса одного груза – I кг. Максимальное число грузов на одну пружину – 5. На каждой ступени нагружения фиксируется упругое перемещение (осадка) пружины. Представлены две системы измерений: одна приближенная – измерительная линейка, другая уточненная – индикаторы часового типа.
Последовательное соединение пружин
Пружины являются важным элементом самых различных механизмов. Для изменения основных эксплуатационных свойств проводится использование нескольких подобных изделий, которые соединяются различным образом. Тип применяемого метода соединения учитывается при проведении самых различных расчетов.

Основные методы крепления пружин
При проведении расчетов уделяется внимание тому, каким образом проводится соединение пружин. Этот момент оказывает влияние на следующее:
- Жесткость системы. Этот показатель встречается практически во всех проводимых расчетах при последовательном подключении деталей. Зависит он от самых различных моментов, к примеру, коэффициента жесткости каждого.
- Требуемое усилие для сжатия или растяжения. Рассматриваемая деталь применяется часто по причине того, что может обеспечивает накопление кинетической энергии.
- Размер кинетической и потенциальной энергии. После того как изделие было выведено из положения равновесия начинает накапливаться кинетическая энергия. При этом она сохраняется на протяжении всего периода, пока к телу приложено усилие.
- Вероятность возникновения свободного колебательного движения, а также степень сопротивления подобному явлению. Для расчетов колебательного движения также применяются специальные формулы.
Бывают самые различные способы соединения пружин, но наибольшее распространение получил метод последовательного и параллельного подключения.
Они характеризуются довольно большим количеством особенностей. Прежде чем рассматривать применение подобных способов соединения следует уделить внимание особенностям самого изделия:
- Деталь изготавливается из проволоки, которая получается методом проката. Она обладает высоким показателем упругости, а также устойчивостью к воздействию окружающей среды.
- Прокат изготавливают из специального сплава, способного выдерживать периодическую деформацию. Под заказ может производится деталь из обычных углеродистых сплавов или легированных металлов, все зависит от конкретного случая.
- Проволока накручивается в виде колец по спирали. При этом должна выдерживаться едина ось, которая определяет распространение силы в одном направлении.
- Выделяют два основных типа детали: растяжения и сжатия. Первый вариант исполнения характеризуется тем, что витки находятся практически вплотную. В случае изготовления изделия для сжатия выдерживается определенный зазор, который позволяет кольцам сближаться, а самому изделию сжиматься.
- Характеризуется изделие самыми различными показателями. Примером можно назвать диаметр проволоки, созданных колец из нее, шаг расположения витков. Все эти параметры указываются в технической документации.

Сегодня они встречаются практически повсеместно. Это связано с тем, что подобное изделие практически незаменимо в случае, когда требуется возвратно-поступательное движение.
Последовательное соединение
При создании многих механизмов применяется последовательное соединение пружин. Среди особенностей этого метода отметим нижеприведенные моменты:
- Наиболее важным параметром можно назвать коэффициент жесткости. Он определяет практически все свойства детали. Коэффициент жесткости при последовательном соединении пружин равен каждому из показателей упругости.
- Также не стоит забывать о том, что показатель смещения тела равен сумме деформации витков. Любой тип рассматриваемого изделия характеризуется максимальным удлинение и сжатием. В случае максимального сжатия кольца расположены вплотную, зазор отсутствует практически полностью. При растяжении есть вероятность деформации витков, из-за чего изделие попросту потеряет свои основные характеристики.
Для расчетов могут применяться самые различные формулы. Среди особенностей этого метода соединения пружин отметим следующее:
- Для начала берется одна деталь с жесткостью K, сила растяжения выражается следующей формулой: x=F/k.
- Следующий шаг заключается в подсоединении второй детали. Для этого могут применяться различные крепежные элементы. При этом две пружины разной длины будут находится в одной системе.
- Если приложить усилие для растягивания обоих изделий, то сила упругости каждой будет равна по модулю. При этом удлинение каждой будет равно х.

Приведенная выше информация указывает на то, что упругость системы двух последовательно соединенных изделий будет примерно в два раза меньше. При этом удлинение будет равно сумме удлинения каждой в отдельности.
Применяемый метод соединения получил весьма широкое распространение. Однако, в некоторых случаях целесообразно применять параллельный метод соединения.
Параллельное соединение
Довольно часто встречается и параллельное соединение пружин. В этом случае смещение тела, которому передается сила, равна деформации каждой из них. Зачастую параллельно соединенные пружины используются тогда, когда нужно передать большее усилие. Особенностями этого метода назовем следующее:
- В рассматриваемом случае жесткости пружины обозначаются буквой k. Построенная схема указывает на то, что жесткость пружин при параллельном соединении остается неизменной, но общий показатель возрастает в два раза.
- Показатель удлинения остается неизменным. При этом сила упругости возрастает в два раза в случае, если обе детали обладают схожими эксплуатационными характеристиками.
Проблемой применения подобной системы можно назвать то, что обе детали должны обладать одинаковой длиной в состоянии покоя. В противном случае сила упругости будет распределяться неравномерно, при этом есть вероятность критической деформации одной из них.

Влияние сопротивления на свободные колебания
Особенности детали определяют то, что при ее применении есть вероятность возникновения свободного колебательного движения. При этом имеет значение, какими особенностями обладает параллельно и последовательно соединенные пружины. Среди особенностей влияния сопротивления на свободное колебание отметим следующие моменты:
- Проведенные тесты указывают на то, что параллельно соединенные пружины препятствуют возникновению свободного колебания. Это можно связать с существенным увеличением жесткости всей системы.
- При последовательном расположении есть вероятность снижения сопротивления, так как расстояние между точкой крепления и телом существенно увеличивается.
Именно поэтому для существенного снижения колебательного вращения на момент эксплуатации системы рекомендуется использовать параллельный метод подключения.
Динамика несвободного движения
Еще одним важным показателем можно назвать динамику несвободного движения. Она может варьировать в достаточно большом диапазоне.
Распространенные последовательно соединенные пружины могут обеспечивать условия для несвободного движения тела. Динамика может нарастать в зависимости от длины в свободном состоянии и передаваемого усилия.
Как определить жесткость системы при последовательном соединении пружин?
Довольно большое количество проблем возникает на момент вычисления жесткости системы при последовательном соединении. Особенностями проводимого расчета в этом случае назовем следующее:
- Важным показателем можно назвать жесткость, которая варьирует в достаточно большом диапазоне. Она во многом определяет свойства изделия. При слишком большой жесткости приходится прикладывать большее усилие для растяжения или сжатия детали.
- Телу придается определенное усилие (F), которое становится причиной удлинения тела на величину x.
- Для расчета применяется формула: k=F/(2x)=1/2F/x=k/2.
Приведенная выше информация указывает на то, что жесткость всей системы в этом случае в два раза меньше показателя жесткости каждого изделия. При этом формула применима только в том случае, если применяемые варианты исполнения для соединения обладают одинаковыми эксплуатационными характеристиками.

Определить жесткость системы пружин можно при самостоятельном проведении соответствующих расчетов. Сегодня система двух пружин получила весьма широкое распространение, так как при ее применении можно добиться требующихся результатов. Однако, прежде чем ее использовать следует провести соответствующие расчеты.
Физика
Силы упругости возникают при деформации тел.
Вычисление силы упругости производится по закону Гука :
где k — коэффициент жесткости (упругости) пружины; Δ x = | l − l 0 | — абсолютная деформация (растяжения или сжатия) пружины, l — длина пружины в недеформированном состоянии, l — длина растянутой (или сжатой) пружины.
Направление силы упругости F → упр (рис. 2.9) противоположно направлению силы, вызывающей деформацию:
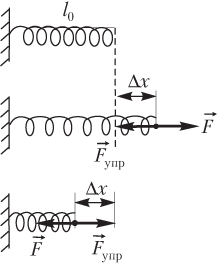
Относительная деформация определяется отношением:
ε = Δ x l 0 или ε = Δ x l 0 ⋅ 100 % ,
где Δ x = | l − l 0 | — абсолютная деформация (растяжения или сжатия) пружины, l — длина недеформированной пружины, l — длина растянутой (сжатой) пружины.
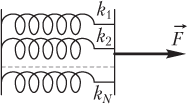
Коэффициент жесткости (упругости) k нескольких пружин одинаковой длины , но разной жесткости вычисляется для последовательного соединения по формуле (рис. 2.10)
1 k = 1 k 1 + 1 k 2 + . + 1 k N ;
где k 1, k 2, . k N — коэффициенты жесткости (упругости) этих пружин.

Коэффициент жесткости (упругости) k нескольких пружин одинаковой длины , но разной жесткости (рис. 10), вычисляется для параллельного соединения по формуле (рис. 2.11)
где k 1, k 2, . k N — коэффициенты жесткости (упругости) этих пружин.
- для последовательного соединения N одинаковых пружин с коэффициентами жесткости (упругости) k :
для параллельного соединения N одинаковых пружин с коэффициентами жесткости (упругости) k :
Пример 16. При последовательном соединении трех пружин, коэффициенты жесткости которых относятся как 1 : 2 : 3, сила 12 Н вызвала растяжение системы на 4,0 см. Рассчитать коэффициенты жесткости указанных пружин.
Решение. Величина силы упругости, действующей на пружину, определяется формулой
где k общ — коэффициент жесткости составной пружины; ∆ x — указанное в условии задачи растяжение пружины.
Величина силы упругости, с другой стороны, совпадает с величиной приложенной силы:
Значение данной силы и величина растяжения пружины под действием этой силы позволяют рассчитать коэффициент жесткости составной пружины:
k общ = F Δ x = 12 4,0 ⋅ 10 − 2 = 300 Н/м.
Для определения коэффициентов жесткости каждой пружины запишем их коэффициенты жесткости в следующем виде:
так как указанные коэффициенты по условию задачи соотносятся между собой как
Для расчета величины k запишем формулу для коэффициента жесткости пружины, состоящей из трех последовательно соединенных пружин, и подставим в нее выражения k 1, k 2, k 3:
1 k общ = 1 k 1 + 1 k 2 + 1 k 3 = 1 k + 1 2 k + 1 3 k = 11 6 k , или k общ = 6 k 11 .
Найденное ранее значение k общ = 300 Н/м позволяет рассчитать k = 550 Н/м.
Тогда коэффициенты жесткости каждой из пружин имеют значения:
k 2 = 2 k = 1100 Н/м;
k 3 = 3 k = 1650 Н/м.
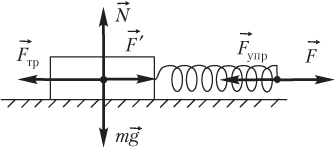
Пример 17. Вычислить абсолютную деформацию пружины с коэффициентом жесткости 100 Н/м, присоединенной к бруску, лежащему на горизонтальной поверхности, в момент начала скольжения бруска по поверхности. Сила, вызывающая скольжение бруска, прикладывается к пружине. Коэффициент трения между бруском и поверхностью равен 0,1. Масса бруска составляет 1,0 кг.
Решение. На рисунке показаны силы, действующие на брусок.
Абсолютную деформацию пружины рассчитаем по формуле
где F упр = F — модуль силы упругости, возникающей в пружине (величина силы упругости равна величине приложенной силы); k — коэффициент жесткости пружины.
Со стороны пружины на брусок действует сила, модуль которой совпадает с силой упругости:
В момент начала скольжения величина силы трения равна силе, приложенной к бруску в направлении движения:
где µ — коэффициент трения; N = mg — модуль силы нормальной реакции опоры.
Поэтому величина силы упругости может быть вычислена по формуле
Из исходного уравнения следует, что величина деформации пружины в момент начала скольжения определяется выражением
Расчет позволяет определить ее значение:
Δ x = 0,1 ⋅ 1,0 ⋅ 10 100 = 10 − 2 м = 1,0 см .
Пример 18. Вычислить массу груза, подвешенного к пружине жесткостью 250 Н/м, если известно, что относительная деформация пружины составляет 25 %. Длину нерастянутой пружины считать равной 100 мм.
Решение. Проиллюстрируем условие задачи рисунком.
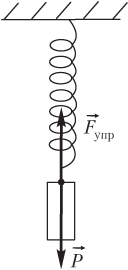
Сила упругости определяется формулой
где k — коэффициент жесткости (упругости) пружины; ∆ x = l − l — абсолютная деформация пружины (величина ее растяжения под действием груза); l — длина недеформированной пружины; l — длина пружины в деформированном состоянии.
Из определения относительной деформации
где ε = 0,25 — относительная деформация (в долях).
С учетом значения относительной деформации формула для вычисления силы упругости принимает вид:
F упр = k ε l 0 = 0,25 k l 0 .
С другой стороны, сила упругости, возникающая в пружине, численно равна весу тела, вызвавшего деформацию пружины:
где m — масса тела; g — модуль ускорения свободного падения.
Таким образом, имеем равенство
позволяющее вычислить массу груза, подвешенного к пружине:
m = 0,25 k l 0 g = 0,25 ⋅ 250 ⋅ 0,100 10 = 0,625 кг = 625 г .
Физика
Силы упругости возникают при деформации тел.
Вычисление силы упругости производится по закону Гука :
где k — коэффициент жесткости (упругости) пружины; Δ x = | l − l 0 | — абсолютная деформация (растяжения или сжатия) пружины, l — длина пружины в недеформированном состоянии, l — длина растянутой (или сжатой) пружины.
Направление силы упругости F → упр (рис. 2.9) противоположно направлению силы, вызывающей деформацию:
Относительная деформация определяется отношением:
ε = Δ x l 0 или ε = Δ x l 0 ⋅ 100 % ,
где Δ x = | l − l 0 | — абсолютная деформация (растяжения или сжатия) пружины, l — длина недеформированной пружины, l — длина растянутой (сжатой) пружины.
Коэффициент жесткости (упругости) k нескольких пружин одинаковой длины , но разной жесткости вычисляется для последовательного соединения по формуле (рис. 2.10)
1 k = 1 k 1 + 1 k 2 + . + 1 k N ;
где k 1, k 2, . k N — коэффициенты жесткости (упругости) этих пружин.
Коэффициент жесткости (упругости) k нескольких пружин одинаковой длины , но разной жесткости (рис. 10), вычисляется для параллельного соединения по формуле (рис. 2.11)
где k 1, k 2, . k N — коэффициенты жесткости (упругости) этих пружин.
- для последовательного соединения N одинаковых пружин с коэффициентами жесткости (упругости) k :
для параллельного соединения N одинаковых пружин с коэффициентами жесткости (упругости) k :
Пример 16. При последовательном соединении трех пружин, коэффициенты жесткости которых относятся как 1 : 2 : 3, сила 12 Н вызвала растяжение системы на 4,0 см. Рассчитать коэффициенты жесткости указанных пружин.
Решение. Величина силы упругости, действующей на пружину, определяется формулой
где k общ — коэффициент жесткости составной пружины; ∆ x — указанное в условии задачи растяжение пружины.
Величина силы упругости, с другой стороны, совпадает с величиной приложенной силы:
Значение данной силы и величина растяжения пружины под действием этой силы позволяют рассчитать коэффициент жесткости составной пружины:
k общ = F Δ x = 12 4,0 ⋅ 10 − 2 = 300 Н/м.
Для определения коэффициентов жесткости каждой пружины запишем их коэффициенты жесткости в следующем виде:
так как указанные коэффициенты по условию задачи соотносятся между собой как
Для расчета величины k запишем формулу для коэффициента жесткости пружины, состоящей из трех последовательно соединенных пружин, и подставим в нее выражения k 1, k 2, k 3:
1 k общ = 1 k 1 + 1 k 2 + 1 k 3 = 1 k + 1 2 k + 1 3 k = 11 6 k , или k общ = 6 k 11 .
Найденное ранее значение k общ = 300 Н/м позволяет рассчитать k = 550 Н/м.
Тогда коэффициенты жесткости каждой из пружин имеют значения:
k 2 = 2 k = 1100 Н/м;
k 3 = 3 k = 1650 Н/м.
Пример 17. Вычислить абсолютную деформацию пружины с коэффициентом жесткости 100 Н/м, присоединенной к бруску, лежащему на горизонтальной поверхности, в момент начала скольжения бруска по поверхности. Сила, вызывающая скольжение бруска, прикладывается к пружине. Коэффициент трения между бруском и поверхностью равен 0,1. Масса бруска составляет 1,0 кг.
Решение. На рисунке показаны силы, действующие на брусок.
Абсолютную деформацию пружины рассчитаем по формуле
где F упр = F — модуль силы упругости, возникающей в пружине (величина силы упругости равна величине приложенной силы); k — коэффициент жесткости пружины.
Со стороны пружины на брусок действует сила, модуль которой совпадает с силой упругости:
В момент начала скольжения величина силы трения равна силе, приложенной к бруску в направлении движения:
где µ — коэффициент трения; N = mg — модуль силы нормальной реакции опоры.
Поэтому величина силы упругости может быть вычислена по формуле
Из исходного уравнения следует, что величина деформации пружины в момент начала скольжения определяется выражением
Расчет позволяет определить ее значение:
Δ x = 0,1 ⋅ 1,0 ⋅ 10 100 = 10 − 2 м = 1,0 см .
Пример 18. Вычислить массу груза, подвешенного к пружине жесткостью 250 Н/м, если известно, что относительная деформация пружины составляет 25 %. Длину нерастянутой пружины считать равной 100 мм.
Решение. Проиллюстрируем условие задачи рисунком.
Сила упругости определяется формулой
где k — коэффициент жесткости (упругости) пружины; ∆ x = l − l — абсолютная деформация пружины (величина ее растяжения под действием груза); l — длина недеформированной пружины; l — длина пружины в деформированном состоянии.
Из определения относительной деформации
где ε = 0,25 — относительная деформация (в долях).
С учетом значения относительной деформации формула для вычисления силы упругости принимает вид:
F упр = k ε l 0 = 0,25 k l 0 .
С другой стороны, сила упругости, возникающая в пружине, численно равна весу тела, вызвавшего деформацию пружины:
где m — масса тела; g — модуль ускорения свободного падения.
Таким образом, имеем равенство
позволяющее вычислить массу груза, подвешенного к пружине:
m = 0,25 k l 0 g = 0,25 ⋅ 250 ⋅ 0,100 10 = 0,625 кг = 625 г .

