

Формула томсона для пружинного маятника
Формулы пружинного маятника
Определение и формулы пружинного маятника
Пружинным маятником называют систему, которая состоит из упругой пружины, к которой прикреплен груз.
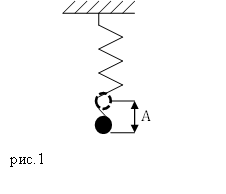
Допустим, что масса груза равна $m$, коэффициент упругости пружины $k$. Масса пружины в таком маятнике обычно не учитывается. Если рассматривать вертикальные движения груза (рис.1), то он движется под действием силы тяжести и силы упругости, если систему вывели из состояния равновесия и предоставили самой себе.
Уравнения колебаний пружинного маятника
Пружинный маятник, совершающий свободные колебания является примером гармонического осциллятора. Допустим, что маятник совершает колебания вдоль оси X. Если колебания малые, выполняется закон Гука, то уравнение движения груза имеет вид:
где $<щu>^2_0=frac
где $
В экспоненциальном виде колебания пружинного маятника можно записать как:
[Re tilde
Формулы периода и частоты колебаний пружинного маятника
Если в упругих колебаниях выполняется закон Гука, то период колебаний пружинного маятника вычисляют при помощи формулы:
Так как частота колебаний ($nu $) – величина обратная к периоду, то:
Формулы амплитуды и начальной фазы пружинного маятника
Зная уравнение колебаний пружинного маятника (1 или 2) и начальные условия можно полностью описать гармонические колебания пружинного маятника. Начальные условия определяют амплитуда ($A$) и начальная фаза колебаний ($varphi $).
Амплитуду можно найти как:
начальная фаза при этом:
где $v_0$ – скорость груза при $t=0 c$, когда координата груза равна $x_0$.
Энергия колебаний пружинного маятника
При одномерном движении пружинного маятника между двумя точками его движения существует только один путь, следовательно, выполняется условие потенциальности силы (любую силу можно считать потенциальной, если она зависит только от координат). Так как силы, действующие на пружинный маятник потенциальны, то можно говорить о потенциальной энергии.
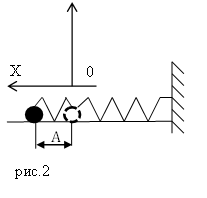
Пусть пружинный маятник совершает колебания в горизонтальной плоскости (рис.2). За ноль потенциальной энергии маятника примем положение его равновесия, где поместим начало координат. Силы трения не учитываем. Используя формулу, связывающую потенциальную силу и потенциальную энергию для одномерного случая:
учитывая, что для пружинного маятника $F=-kx$,
тогда потенциальная энергия ($E_p$) пружинного маятника равна:
Закон сохранения энергии для пружинного маятника запишем как:
где $dot
Из формулы (10) можно сделать следующие выводы:
- Максимальная кинетическая энергия маятника равна его максимальной потенциальной энергии.
- Средняя кинетическая энергия по времени осциллятора равна его средней по времени потенциальной энергии.
Примеры задач с решением
Задание. Маленький шарик, массой $m=0,36$ кг прикреплен к горизонтальной пружине, коэффициент упругости которой равен $k=1600 frac<Н><м>$. Каково было начальное смещение шарика от положения равновесия ($x_0$), если он при колебаниях проходит его со скоростью $v=1 frac<м><с>$?
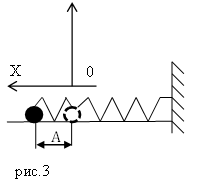
Решение. Сделаем рисунок.
По закону сохранения механической энергии (так как считаем, что сил трения нет), запишем:
где $E_
Потенциальная энергия равна:
В соответствии с (1.1) приравняем правые части (1.2) и (1.3), имеем:
Из (1.4) выразим искомую величину:
Вычислим начальное (максимальное) смещение груза от положения равновесия:
Ответ. $x_0=1,5$ мм
Задание. Пружинный маятник совершает колебания по закону: $x=A
Решение. Возвращающей силой для пружинного маятника является сила упругости, равная:
Потенциальную энергию колебаний груза найдем как:
В момент времени, который следует найти $F=F_0$; $E_p=E_
Пружинный маятник
Определения и формулы пружинного маятника
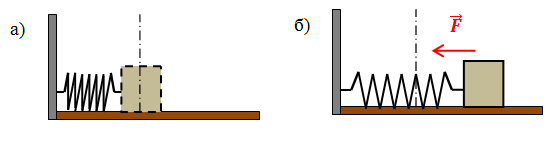
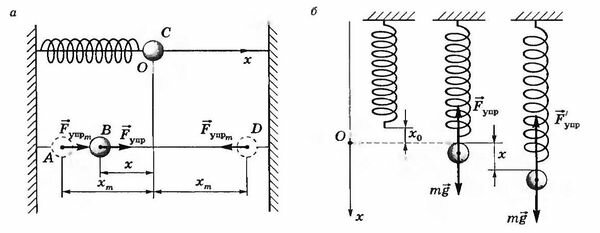
Рис.1. Пружинный маятник: а) в положении равновесия; б) в состоянии колебаний
Когда пружина не деформирована, тело находится в положении равновесия (рис.1,а). Если растянув или сжав пружину, вывести тело из положения равновесия, на него будет действовать сила упругости  со стороны деформированной пружины. Эта сила направлена к положению равновесия и в данном случае является возвращающей силой.
со стороны деформированной пружины. Эта сила направлена к положению равновесия и в данном случае является возвращающей силой.
Сила упругости в пружинном маятнике
Сила упругости пропорциональна смещению тела (удлинению пружины):

здесь  — коэффициент жесткости пружины.
— коэффициент жесткости пружины.
В положении, соответствующем максимальному отклонению тела от положения равновесия (смещение тела равно амплитуде колебаний) сила упругости максимальна, поэтому максимально и ускорение тела. По мере приближения тела к положению равновесия удлинение пружины уменьшается, и, следовательно, уменьшается ускорение тела, которое обусловлено силой упругости. Достигнув положения равновесия, тело не остановится, хотя в этот момент сила упругости равна нулю. Скорость тела в момент прохождения им положения равновесия имеет максимальное значение, и тело по инерции будет двигаться дальше, растягивая пружину. Возникающая при этом сила упругости будет тормозить тело, так как теперь она направлена в сторону, противоположную движению тела. Дойдя до крайнего положения, тело остановится и начнет движение в противоположном направлении. Движение тела будет повторяться в описанной последовательности.
Таким образом, причинами свободных колебаний пружинного маятника является сила упругости деформированной пружины (возвращающая сила) и инертность тела.
Период свободных колебаний пружинного маятника
Период свободных колебаний пружинного маятника определяется по формуле:
Учебники
Журнал “Квант”
Общие
Пружинный маятник
Пружинный маятник — это колебательная система, состоящая из материальной точки массой т и пружины. Рассмотрим горизонтальный пружинный маятник (рис. 13.12, а). Он представляет собой массивное тело, просверленное посередине и надетое на горизонтальный стержень, вдоль которого оно может скользить без трения (идеальная колебательная система). Стержень закреплен между двумя вертикальными опорами. К телу одним концом прикреплена невесомая пружина. Другой ее конец закреплен на опоре, которая в простейшем случае находится в покое относительно инерциальной системы отсчета, в которой происходят колебания маятника. В начале пружина не деформирована, и тело находится в положении равновесия С. Если, растянув или сжав пружину, вывести тело из положения равновесия, то со стороны деформированной пружины на него начнет действовать сила упругости, всегда направленная к положению равновесия. Пусть мы сжали пружину, переместив тело в положение А, и отпустили ((upsilon_0=0).) Под действием силы упругости оно станет двигаться ускоренно. При этом в положении А на тело действует максимальная сила упругости, так как здесь абсолютное удлинение xm пружины наибольшее. Следовательно, в этом положении ускорение максимальное. При движении тела к положению равновесия абсолютное удлинение пружины уменьшается, а следовательно, уменьшается ускорение, сообщаемое силой упругости. Но так как ускорение при данном движении сонаправлено со скоростью, то скорость маятника увеличивается и в положении равновесия она будет максимальна. Достигнув положения равновесия С, тело не остановится (хотя в этом положении пружина не деформирована, и сила упругости равна нулю), а обладая скоростью, будет по инерции двигаться дальше, растягивая пружину. Возникающая при этом сила упругости направлена теперь против движения тела и тормозит его. В точке D скорость тела окажется равной нулю, а ускорение максимально, тело на мгновение остановится, после чего под действием силы упругости начнет двигаться в обратную сторону, к положению равновесия. Вновь пройдя его по инерции, тело, сжимая пружину и замедляя движение, дойдет до точки А (так как трение отсутствует), т.е. совершит полное колебание. После этого движение тела будет повторяться в описанной последовательности. Итак, причинами свободных колебаний пружинного маятника являются действие силы упругости, возникающей при деформации пружины, и инертность тела.
F_x=-kx.) По второму закону Ньютона (
F_x = ma_x.) Следовательно, (
ma_x = -kx.) Отсюда
(a_x = -frac
Видим, что ускорение прямопропорционально смешению и противоположно ему направлено. Сравнивая полученное уравнение с уравнением гармонических колебаний (
a_x + omega^2 x = 0,) видим, что пружинный маятник совершает гармонические колебания с циклической частотой (omega = sqrt frac
(T = 2 pi sqrt< frac
По этой же формуле можно рассчитывать и период колебаний вертикального пружинного маятника (рис. 13.12. б). Действительно, в положении равновесия благодаря действию силы тяжести пружина уже растянута на некоторую величину x, определяемую соотношением (
mg=kx_0.) При смещении маятника из положения равновесия O на х проекция силы упругости (
F’_
ma_x=-k(x_0+ x) + mg.) Подставляя сюда значение (
kx_0=mg,) получим уравнение движения маятника (a_x + frac
Литература
Аксенович Л. А. Физика в средней школе: Теория. Задания. Тесты: Учеб. пособие для учреждений, обеспечивающих получение общ. сред, образования / Л. А. Аксенович, Н.Н.Ракина, К. С. Фарино; Под ред. К. С. Фарино. — Мн.: Адукацыя i выхаванне, 2004. — С. 377-378.
Свободные колебания. Пружинный маятник
Свободные колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия.
Для того, чтобы свободные колебания совершались по гармоническому закону, необходимо, чтобы сила, стремящаяся возвратить тело в положение равновесия, была пропорциональна смещению тела из положения равновесия и направлена в сторону, противоположную смещению:
В этом соотношении ω – круговая частота гармонических колебаний. Таким свойством обладает упругая сила в пределах применимости закон Гука:
Силы любой другой физической природы, удовлетворяющие этому условию, называются квазиупругими.
Таким образом, груз некоторой массы m, прикрепленный к пружине жесткости k, второй конец которой закреплен неподвижно (рис. 2.2.1), составляют систему, способную в отсутствие трения совершать свободные гармонические колебания. Груз на пружине называют линейным гармоническим осциллятором.
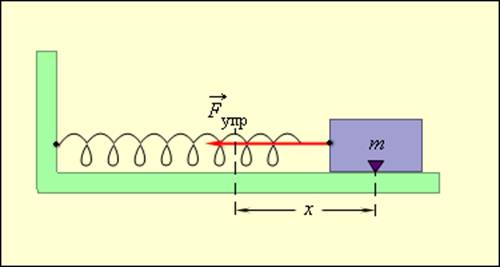
Колебания груза на пружине. Трения нет
Круговая частота ω свободных колебаний груза на пружине находится из второго закона Ньютона:
 ,
,
Частота ω называется собственной частотой колебательной системы.
Период T гармонических колебаний груза на пружине равен
При горизонтальном расположении системы пружина–груз сила тяжести, приложенная к грузу, компенсируется силой реакции опоры. Если же груз подвешен на пружине, то сила тяжести направлена по линии движения груза. В положении равновесия пружина растянута на величину x, равную

и колебания совершаются около этого нового положения равновесия. Приведенные выше выражения для собственной частоты ω и периода колебаний T справедливы и в этом случае.
Строгое описание поведения колебательной системы может быть дано, если принять во внимание математическую связь между ускорением тела a и координатой x: ускорение является второй производной координаты тела x по времени t:
Поэтому второй закон Ньютона для груза на пружине может быть записан в виде

 (*)
(*)

Все физические системы (не только механические), описываемые уравнением (*), способны совершать свободные гармонические колебания, так как решением этого уравнения являются гармонические функции вида
Уравнение (*) называется уравнением свободных колебаний. Следует обратить внимание на то, что физические свойства колебательной системы определяют только собственную частоту колебаний ω или период T. Такие параметры колебательного процесса, как амплитуда xm и начальная фаза φ, определяются способом, с помощью которого система была выведена из состояния равновесия в начальный момент времени.
Если, например, груз был смещен из положения равновесия на расстояние Δl и затем в момент времени t = 0 отпущен без начальной скорости, то xm = Δl, φ = 0.
Если же грузу, находившемуся в положении равновесия, с помощью резкого толчка была сообщена начальная скорость  , то
, то
Таким образом, амплитуда xm свободных колебаний и его начальная фаза φ определяются начальными условиями.
Существует много разновидностей механических колебательных систем, в которых используются силы упругих деформаций. На рис. 2.2.2 показан угловой аналог линейного гармонического осциллятора, совершающий крутильные колебания. Горизонтально расположенный диск висит на упругой нити, закрепленной в его центре масс. При повороте диска на угол θ возникает момент сил Mупр упругой деформации кручения:
Это соотношение выражает закон Гука для деформации кручения. Величина χ аналогична жесткости пружины k. Второй закон Ньютона для вращательного движения диска записывается в виде

где I = IC – момент инерции диска относительно оси, проходящий через центр масс, ε – угловое ускорение.
По аналогии с грузом на пружине можно получить:
Крутильный маятник широко используется в механических часах. Его называют балансиром. В балансире момент упругих сил создается с помощью спиралевидной пружинки.

