

Управление оборотами двигателя переменного тока
Виды и устройство регуляторов оборотов коллекторных двигателей
Коллекторные двигатели часто можно встретить в бытовых электроприборах и в электроинструменте: стиральная машина, болгарка, дрель, пылесос и т. д. Что совсем не удивительно, ведь коллекторные двигатели позволяют получать и высокие обороты, и большой крутящий момент (в том числе высокий пусковой момент) — что и нужно для большинства электроинструментов.
При этом коллекторные двигатели могут питаться как постоянным током (в частности – выпрямленным), так и переменным током от бытовой сети. Для управления скоростью вращения ротора коллекторного двигателя применяют регуляторы оборотов, о них и пойдет речь в данной статье.

Для начала вспомним устройство и принцип работы коллекторного двигателя. Коллекторный двигатель включает в себя обязательно следующие части: ротор, статор и щеточно-коллекторный коммутационный узел. Когда питание подается на статор и на ротор, их магнитные поля начинают взаимодействовать, ротор начинает в итоге вращаться.
Питание на ротор подается через графитовые щетки, плотно прилегающие к коллектору (к ламелям коллектора). Для изменения направления вращения ротора, необходимо изменить фазировку напряжения на статоре или на роторе.

Обмотки ротора и статора могут питаться от разных источников или же могут быть соединены параллельно либо последовательно друг с другом. Так различаются коллекторные двигатели параллельного и последовательного возбуждения. Именно коллекторные двигатели последовательного возбуждения можно встретить в большинстве бытовых электроприборов, поскольку такое включение позволяет получить устойчивый к перегрузкам двигатель.
Говоря о регуляторах оборотов, прежде всего остановимся на самой простой тиристорной (симисторной) схеме (смотрите ниже). Данное решение применяется в пылесосах, стиральных машинах, болгарках, и показывает высокую надежность при работе в цепях переменного тока (особенно от бытовой сети).
Работает данная схема достаточно незатейливо: на каждом периоде сетевого напряжения конденсатор заряжается через резистор до напряжения отпирания динистора, присоединенного к управляющему электроду основного ключа (симистора), после чего симистор открывается и пропускает ток к нагрузке (к коллекторному двигателю).
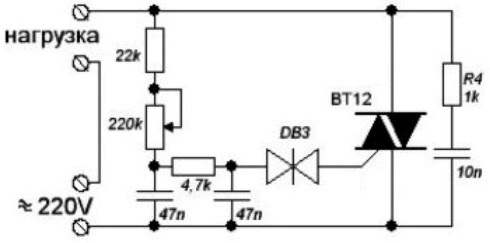
Регулируя время зарядки конденсатора в цепи управления открыванием симистора, регулируют среднюю мощность подаваемую на двигатель, соответственно регулируют обороты. Это простейший регулятор без обратной связи по току.
Симисторная схема похожа на обычный диммер для регулировки яркости ламп накаливания, обратной связи в ней нет. Чтобы появилась обратная связь по току, например чтобы удерживать приемлемую мощность и не допускать перегрузок, необходима дополнительная электроника. Но если рассмотреть варианты из простых и незатейлевых схем, то за симисторной схемой следует реостатная схема.
Реостатная схема позволяет эффективно регулировать обороты, но приводит к рассеиванию большого количества тепла. Здесь требуется радиатор и эффективный отвод тепла, а это потери энергии и низкий КПД в итоге.
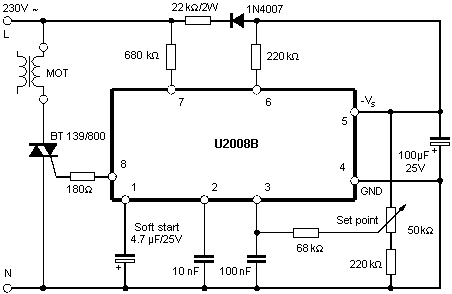
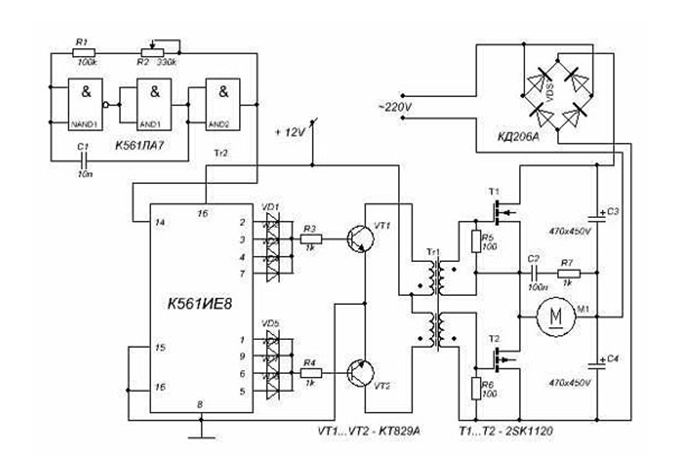
Более эффективны схемы регуляторов на специальных схемах управления тиристором или хотя бы на интегральном таймере. Коммутация нагрузки (коллекторного двигателя) на переменном токе осуществляется силовым транзистором (или тиристором), который открывается и закрывается один или несколько раз в течение каждого периода сетевой синусоиды. Так регулируется средняя мощность, подаваемая на двигатель.
Схема управления питается от 12 вольт постоянного напряжения от собственного источника или от сети 220 вольт через гасящую цепь. Такие схемы подходят для управления мощными двигателями.
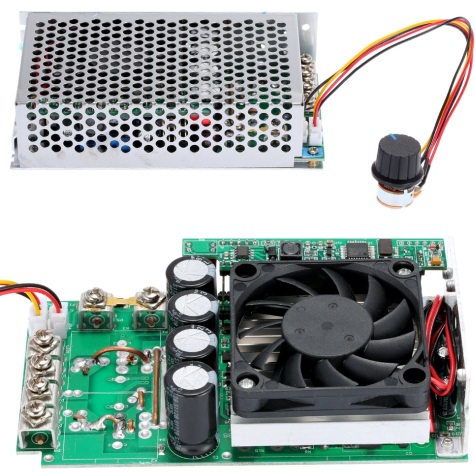
Принцип регулирования с микросхемами на постоянном токе — это конечно ШИМ — широтно-импульсная модуляция. Транзистор, например, открывается с строго заданной частотой в несколько килогрец, но длительность открытого состояния регулируется. Так, вращая ручку переменного резистора, устанавливают скорость вращения ротора коллекторного двигателя. Данный метод удобен для удержания малых оборотов коллекторного двигателя под нагрузкой.
Более качественное управление — именно регулировка по постоянному току. Когда ШИМ работает на частоте порядка 15 кГц, регулируя ширину импульсов, управляют напряжением при примерно одном и том же токе. Скажем, регулируя постоянное напряжение в диапазоне от 10 до 30 вольт, получают разные обороты при токе порядка 80 ампер, добиваясь требуемой средней мощности.
Если вы хотите изготовить простой регулятор для коллекторного двигателя своими руками без особых запросов к обратной связи, то можно выбрать схему на тиристоре. Потребуется лишь паяльник, конденсатор, динистор, тиристор, пара резисторов и провода.
Если же нужен более качественный регулятор с возможностью поддержания устойчивых оборотов при нагрузке динамического характера, присмотритесь к регуляторам на микросхемах с обратной связью, способным обрабатывать сигнал с тахогенератора (датчика скорости) коллекторного мотора, как это реализовано например в стиральных машинах.
Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.

Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 – s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 – 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
 Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения – асинхронный двигатель (ТРН – АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения – электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
 Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода

Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 – 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
 Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 7. Схемы переключения обмоток асинхронного двигателя: а – с одинарной звезды на двойную; б – с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
2 Схемы
Принципиальные электросхемы, подключение устройств и распиновка разъёмов

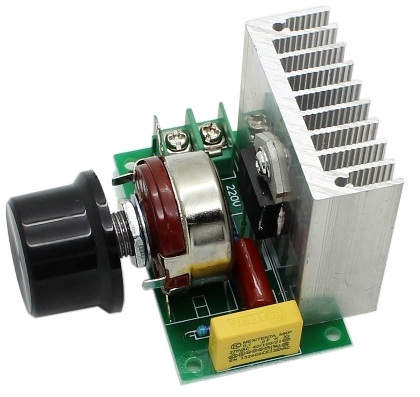
Регулятор оборотов электродвигателя 220В

Качественный и надёжный контроллер скорости вращения для однофазных коллекторных электродвигателей можно сделать на распространённых деталях буквально за 1 вечер. Эта схема имеет встроенный модуль обнаружения перегрузки, обеспечивает мягкий пуск управляемого двигателя и стабилизатор скорости вращения мотора. Работает такой блок с напряжением как 220, так и 110 вольт.
Технические параметры регулятора
- напряжение питания: 230 вольт переменного тока
- диапазон регулирования: 5…99%
- напряжение нагрузки: 230 В / 12 А (2,5 кВт с радиатором)
- максимальная мощность без радиатора 300 Вт
- низкий уровень шума
- стабилизация оборотов
- мягкий старт
- размеры платы: 50×60 мм
Принципиальная электросхема
Схема модуля системы регулирования основана на генераторе ШИМ импульсов и симисторе управления мотором — классическая схемотехника для подобных устройств. Элементы D1 и R1 обеспечивают ограничение величины напряжения питания до значения безопасной для питания микросхемы генератора. Конденсатор C1 отвечает за фильтрацию напряжения питания. Элементы R3, R5 и P1 являются делителем напряжения с возможностью его регулирования, который используется для задания величины мощности, подаваемой в нагрузку. Благодаря применению резистора R2, непосредственно входящего в цепь поступления на м/с фазы, внутренние блоки синхронизированы с симистором ВТ139.
На следующем рисунке показано расположение элементов на печатной плате. Во время монтажа и запуска следует обратить внимание на обеспечение условий безопасной работы — регулятор имеет питание от сети 220В и его элементы непосредственно подключены к фазе.
Увеличение мощности регулятора
В испытательном варианте был применен симистор BT138/800 с максимальным током 12 А, что дает возможность управления нагрузкой более 2 кВт. Если необходимо управление ещё большими токами нагрузки — советуем тиристор установить за пределами платы на большом радиаторе. Также следует помнить о правильном выборе предохранителя FUSE в зависимости от нагрузки.

Кроме управления оборотами электромоторов, можно без каких-либо переделок использовать схему для регулировки яркости ламп.
Способы регулировки оборотов вращения асинхронных двигателей
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».

Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.

Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
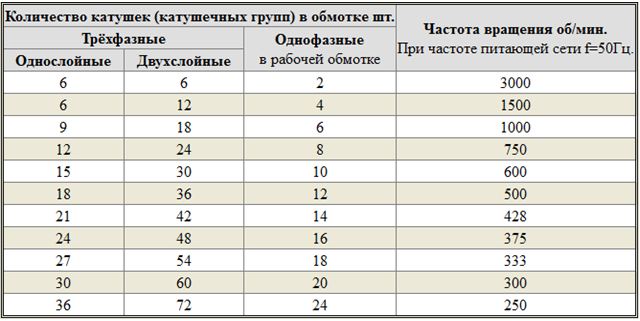
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),
Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют ‘Экономитель энергии Electricity Saving Box’. Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:

- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
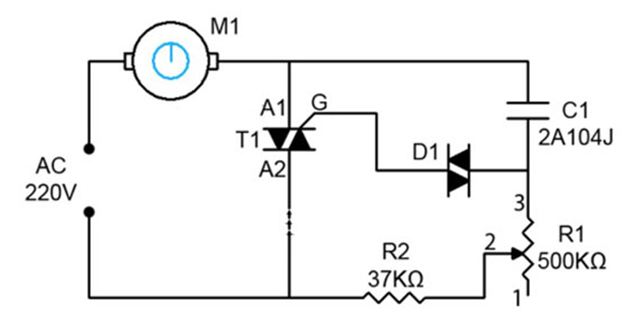
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.

