

Шаговый двигатель схема подключения
Подключение шагового двигателя к Ардуино

Шаговый двигатель Arduino ► предназначен для перемещения объекта на заданное количество шагов вала. Рассмотрим устройство и схему подключения шагового двигателя.
Шаговый двигатель (stepper motor) предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.h или accelstepper.h. Рассмотрим принцип работы и схему подключения шагового двигателя к Arduino Uno / Nano, а также разберем скетч для управления шаговым мотором.
Принцип работы шагового двигателя
В зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели. У двигателей с постоянным магнитом число шагов на один оборот вала доходит до 48, то есть один шаг соответствует повороту вала на 7,5°. Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
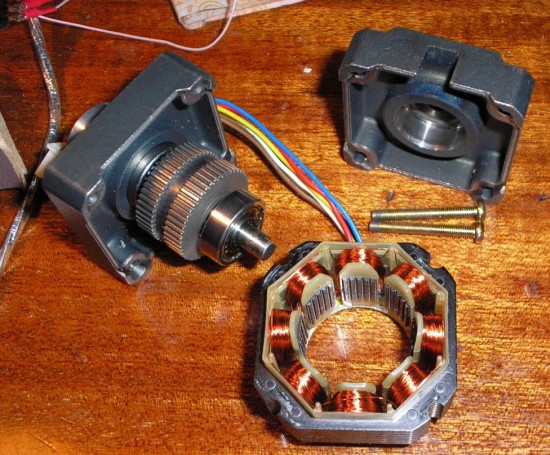
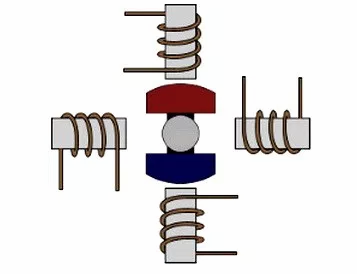
Фото. Устройство шагового мотора в разрезе
Подсчитав количество сделанных шагов, можно определить точный угол поворота ротора. Таким образом, шаговый двигатель является сегодня идеальным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.
Драйвер шагового двигателя Ардуино
Шаговый двигатель — это бесколлекторный синхронный двигатель, как и все двигатели, он преобразует электрическую энергию в механическую. В отличие от двигателя постоянного тока в которых происходит вращение вала, вал шаговых двигателей совершает дискретные перемещения, то есть вращается не постоянно, а шагами. Каждый шаг вала (ротора) представляет собой часть полного оборота.
Фото. Виды драйверов для управления шаговым двигателем
Вращение вала двигателя осуществляется с помощью сигнала, который управляет магнитным полем катушек в статоре драйвера. Сигнал генерирует драйвер шагового двигателя. Магнитное поле, возникающее при прохождении электрического тока в обмотках статора, заставляет вращаться вал, на котором установлены магниты. Количество шагов задаются в программе с помощью библиотеки Arduino IDE.
Схема подключения шагового двигателя 28BYJ-48 к Arduino Uno через драйвер ULN2003 изображена на рисунке ниже. Основные характеристики мотора 28BYJ-48: питание от 5 или 12 Вольт, 4-х фазный двигатель, угол шага 5,625°. Порты драйвера IN1 — IN4 подключаются к любым цифровым выводам платы Arduino Mega или Nano. Светодиоды на модуле служат для индикации включения катушек двигателя.
Как подключить шаговый двигатель к Ардуино
Для занятия нам понадобятся следующие детали:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- драйвер шагового двигателя ULN2003;
- шаговый двигатель 28BYJ-48;
- провода «папа-мама».
Схема подключения шагового двигателя к Arduino UNO
Управление шаговым двигателем через Ардуино производится путем подачи импульсов на обмотки мотора в определенной последовательности. Для облегчения управления шаговым мотором созданы специальные библиотеки stepper.h и accelstepper.h, но можно вращать вал мотора без стандартных библиотек. Подключите шаговый мотор к микроконтроллеру, как на схеме выше и загрузите следующий скетч.
Скетч для управления шаговым двигателем
Пояснения к коду:
- вместо портов 8,9,10,11 можно использовать любые цифровые порты;
- время задержки в миллисекундах int dl = 5; можно изменять, чем меньше задержка в программе, тем быстрее будет вращаться вал мотора;
- алгоритм работы программы, представлен на следующей картинке.
Последовательность включения обмоток шагового мотора
Управление шаговым двигателем на Ардуино
Рассмотрим управление шаговым мотором при помощи стандартной библиотеки stepper.h и с помощью более удобной и популярной библиотеки accelstepper.h, где реализовано намного больше дополнительных команд и функций. Схема подключения мотора при этом остается неизменной. Чуть дальше мы перечислили возможные команды, которые можно использовать в программе с этими библиотеками.
Скетч для шагового двигателя на Ардуино (Stepper.h)
Пояснения к коду:
- вместо портов 8,9,10,11 можно использовать любые цифровые порты;
- библиотека Stepper.h имеет маленький функционал, поэтому подходит только для тестирования шагового двигателя и проверки подключения драйвера.
Скетч для шагового мотора с библиотекой AccelStepper.h
Пояснения к коду:
- библиотеку AccelStepper.h можно использовать при подключении шагового двигателя к Motor Shield L293D совместно с библиотекой AFMotor.h;
- в программе можно задавать не только максимальную скорость, но и ускорение и замедление вала шагового двигателя.
Описание команд библиотеки AccelStepper.h
AccelStepper mystepper(DRIVER, step, direction); // Шаговый двигатель, управляемый платой
AccelStepper mystepper(FULL2WIRE, pinA, pinB); // Шаговый двигатель, управляемый Н-мостом
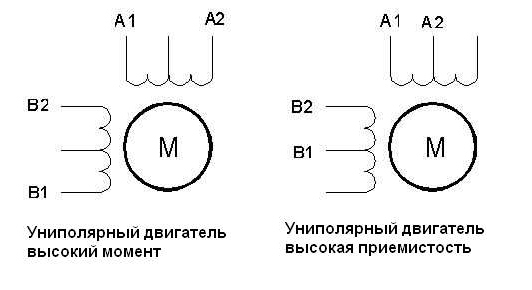
AccelStepper mystepper(FULL4WIRE, pinA1, pinA2, pinB1, pinB2); // Униполярный двигатель
Ардуино и шаговый двигатель: основы, схемы, подключение и управление
Шаговые двигатели используют для управления положением чего-либо, или для вращения рабочего узла с заданной скорости и на заданный угол. Такие особенности сделали возможным его применение в робототехнике, станках с числовым программным управлением (ЧПУ), и других системах автоматизации. В этой статье мы рассмотрим ряд вопросов связанных с устройством шаговых двигателей и способами их управления с помощью микроконтроллера Arduino.
Шаговый двигатель отличия от обычного
Все используемые на практике электродвигатели работают за счет электродинамических явлений и процессов происходящих в магнитных полях роторов и статоров. Как мы уже упомянули, любой двигатель состоит как минимум из двух частей – подвижной (ротор) и неподвижной (статор). Для его вращения нужно чтобы и магнитное поле тоже вращалось. Поле ротора вращается вслед за полем статора.
В принципе, таких базовых сведений достаточно для понимания общей картины работы электрических двигателей. Однако на самом деле промышленность производит различные варианты электродвигателя, среди которых:
1. Асинхронный двигатель с короткозамкнутым или с фазным ротором.
2. Синхронный двигатель с обмотками возбуждения или с постоянными магнитами.
3. Двигатель постоянного тока.
4. Универсальный коллекторный двигатель (работает и на постоянном токе и на переменном, ведь обмотки ротора сами подключаются и отключаются от контактов источника питания за счет конструкции ламелей и якоря).
5. Бесщеточные двигатели постоянного тока (BLDC).
7. Шаговые двигатели.
Последние два вида несут особую ценность, благодаря возможности их, в определенной степени, точного позиционирования в пространстве. Давайте подробнее рассмотрим конструкцию шагового двигателя.
Определение
Шаговым двигателем называется бесщеточный электродвигатель синхронного типа. На статоре расположено определенное число обмоток, подключение которых вызывает поворот ротора на определенный угол, зависящий от числа шагов. Другими словами ток в обмотке статора вызывает поворот вала на дискретный угол.
При равномерной и последовательной смене полярностей напряжения на обмотках и переключении запитанных обмоток происходит вращение шагового двигателя, подобно обычному электродвигателю, хотя на самом деле просто происходит регулярный поворот на фиксированный угол.
Шаговый двигатель иногда называют двигателем с конечным количеством положений ротора. Звучит не совсем понятно, давайте разберемся. Представим обычный двигатель – положение его ротора никак не фиксируется, то есть он просто вращается пока подключено питание, а когда оно отключается, то останавливается через какое-то время, зависящее от его инерции. Положений ротора может быть сколько угодно много, а отличаться они могут на мельчайшие доли градуса.
В шаговом двигателе подключение обмотки или нескольких обмоток вызывает «примагничивание» ротора по отношению к этим обмоткам. Внешне это выглядит именно как поворот вала на определенный угол (шаг). Так как количество шагов является одной из важных характеристик этого типа электропривода, то и количество положений ротора равно количеству шагов. Новичкам сложно понять, как это может быть, и как он в таком случае вращается – на самом деле все достаточно просто, мы это покажем на иллюстрациях и описаниях ниже.
Конструкция
На статоре электродвигателя закреплены обмотки возбуждения. Его ротор выполняется из магнитомягких или магнитотвердых материалов. От материала ротора зависит крутящий момент и фиксация вала при обесточенных обмотках. Эти параметры могут быть критичными.
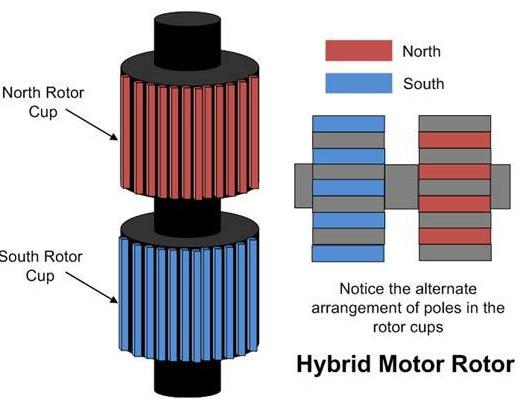
Поэтому выделяют магнитотвердые роторы (они же на постоянных магнитах) и магнитомягкие (реактивные) роторы, кроме них есть и гибридные роторы.
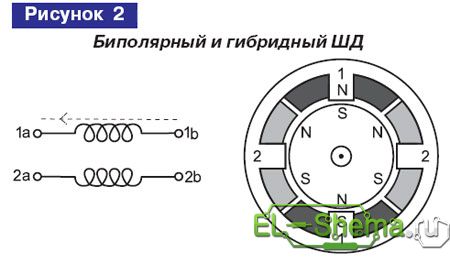
Гибридный ротор делают зубчатым, количество зубцов соответствует количеству шагов. Зубцы расположены вдоль оси ротора. При этом такой ротор разделен на две части поперек. Между ними установлен постоянный магнит, таким образом, каждая из половин ротора является полюсом магнита. Также следует сказать, о том, что половины ротора повернуты на половину шага зубцов друг относительно друга.
Как уже было сказано, такой двигатель является синхронным, так и процесс его вращения заключается в создании вращающего поля ротора, за которым стремится магнитный ротор, а это реализовывается за счет переключения контроллером обмоток поочередно.
Виды шаговых двигателей ШД по конструкции обмоток делят на три основных группы по схеме подключения обмоток:
3. С четырьмя обмотками.

Биполярные электродвигателя в большинстве своем имеют 4 контакта – это выводы с двух обмоток. Внутри двигателя они по большому счету никак не соединены между собой. Основной проблемой является то, что нужно обеспечить переключение полярности питания, это значит, что драйвер и сам процесс управления усложнится.
Униполярные напоминают соединение обмоток по схеме звезды. Другими словами, у вас есть 5 выводов – 4 из них это концы обмоток, а 1 – точка соединения всех обмоток.
Для управления таким двигателем нужно просто подавать поочередно питание на каждый из концов обмотки (или их пару, в зависимости от выбранного режима вращения), таким образом будет запитываться каждый раз половинка обмотки. Может работать в биполярном режиме, если запитывать полностью всю обмотку минуя отвод от её середины.
Двигатели с 4 обмотками имеют преимущество в том, что вы можете подключить обмотки любым удобным для вас образом и получить как биполярный, так и униполярный двигатель.
Режимы управления
Различают 4 основных режима управления шаговым двигателем:
1. Волновое управление.
Волновым управлением называют управление одной обмоткой. Т.е. одновременно ток течет через одну из обмоток, отсюда две отличительных черты – низкое энергопотребление (это хорошо) и низкий крутящий момент (это плохо).
В данном случае этот двигатель делает 4 шага за один оборот. Реальные же двигатели делают десятки шагов за один оборот, это достигается бОльшим количеством чередований магнитных полюсов.
Полношаговое управление является наиболее часто используемым. Здесь напряжение подается не на одну обмотку, а на две сразу. Если обмотки соединены параллельно – то ток удваивается, а если последовательно, то удваивается напряжение питания соответственно. С одной стороны в таком методе управления двигатель потребляет больше энергии, с другой – крутящий момент 100%, в отличие от предыдущего.
Полушаговое управление интересно тем, что становится возможным более точное позиционирование вала двигателя, благодаря к тому, что к целым шагам добавляются еще и половинки это достигается совмещение предыдущих двух режимов работы, а обмотки чередуются, то включаясь попарно, то по одной.
Стоит учесть, что момент на валу плавает от 50 до 100% в зависимости от того 1 или 2 две обмотки задействованы в данный момент.
Еще более точным является микрошаговый. Он похож на предыдущий, но отличается тем, что питание на обмотки подаётся не полной величины, а постепенно изменяющейся. Таким образом, изменяется степень воздействия на ротор каждой из обмоток и плавно изменяется угол поворота вала в промежуточных шагам положениях.

Где взять шаговый двигатель
Купить шаговый двигатель вы успеете всегда, но настоящие радиолюбители, самодельщики и электронщики славятся тем, что могут из мусора сделать что-то полезное. Наверняка, у вас дома найдется хотя бы один шаговый двигатель. Давайте разберемся, где нужно искать, чтобы найти такой двигатель.
1. Принтера. Шаговые двигатели могут стоять на вращении вала подачи бумаги (но может быть и двигатель постоянного тока с датчиком перемещения).
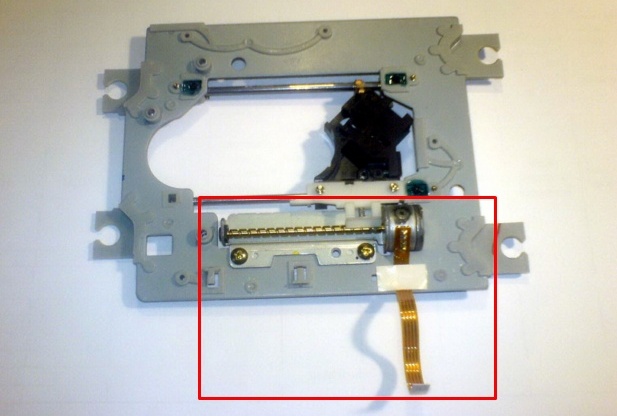
2. Сканеры и МФУ. В сканерах часто устанавливают шаговый двигатель и механическую часть, направляющую вдоль которой ходит каретка, эти детали также могут стать полезны при разработке самодельного ЧПУ станка.
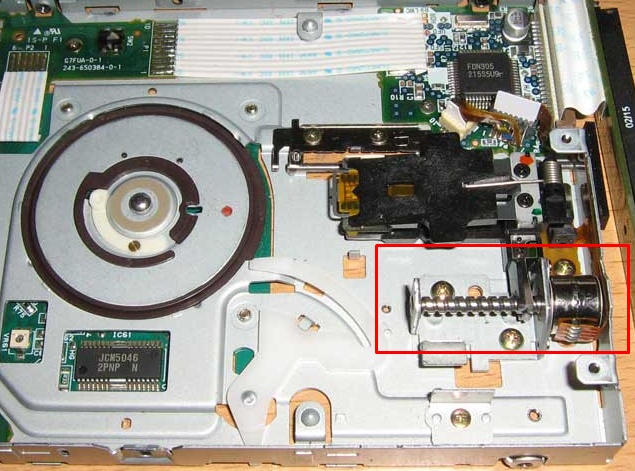
3. CD и DVD приводы. В них также можно достать и штанги и винтовые валы для самоделок и различных ЧПУ.
4. Floppy-дисководы. В дискетниках также есть шаговые двигатели, особо ценятся флопики формата 5.25”.
Драйвер для шагового двигателя
Для управления шаговыми двигателями используют специализированные микросхемы-драйвера. В большинстве своем это H-мост из транзисторов. Благодаря такому включению появляется возможность включать на обмотку напряжение нужной полярности. Эти микросхемы подходят и для управления двигателями постоянного тока с поддержкой изменения направления вращения.
В принципе очень маленькие двигателя можно запустить и прямо от пинов микроконтроллера, но обычно они выдают до 20-40 мА, чего в большинстве случае недостаточно. Поэтому приведем несколько примеров драйверов для шаговых двигателей:
1. Платы на базе L293D. Их множество, одна из таких продается под отечественной маркой «Амперка» под название Troyka Stepper, пример его использования в реальном проекте приведен на видео ниже. Преимущество конкретно этой платы в том, что на ней расположены микросхемы логики которые позволяют сократить количество используемых для управления пинов.
Сама по себе микросхема работает под напряжение 4.5-36В и выдает ток до 600мА-1А в зависимости от корпуса ИМС.
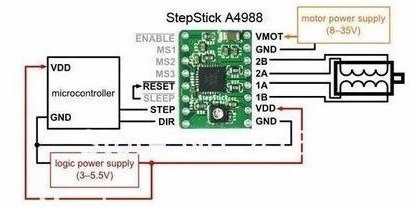
2. Драйвер на базе A4988. Питается напряжением до 35В, выдерживает ток до 1А без радиатора, а с радиатором до 2А. Может управлять двигателем, как целыми шагами, так и частями – от 1/16 шага до 1 шага, всего 5 вариантов. Содержит два H-моста. С помощью подстроечного резистора (видно на правом фото) можно задавать выходной ток.
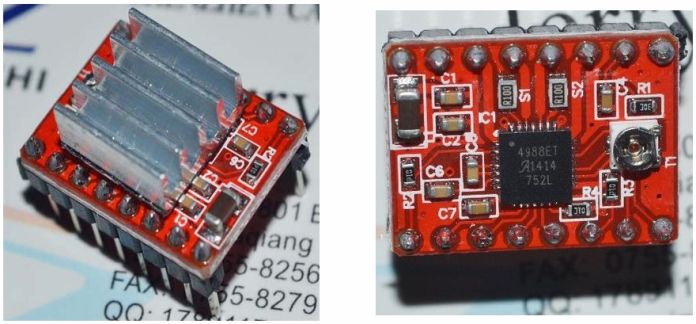
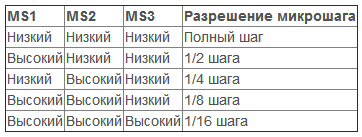
Размер шага задается сигналами на входах MS1, MS2, MS3.
Вот схема его подключения, каждый импульс на входе STEP задает поворот двигателя на 1 шаг или на микрошаг.
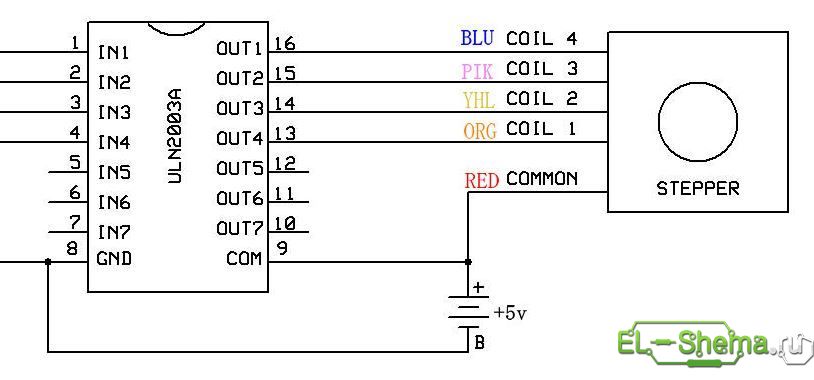
3. Драйвер на базе ULN2003 работает с двигателями на 5 и на 12В и выдаёт ток до 500 мА. На большинстве плат расположены 4 светодиода индицирующих работу каждого из каналов.
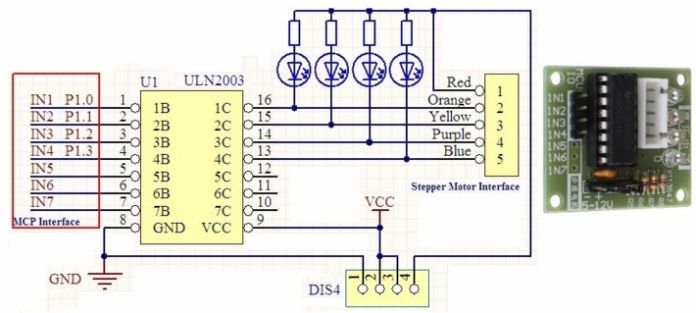
Также на плате вы можете видеть клеммную колодку для подключения двигателей, кстати, многие из них продаются именно с таким разъёмом. Примером такого двигателя является 5В модель – 28BYJ-48.
И это не все варианты драйверов для шаговых двигателей, на самом деле их еще больше.
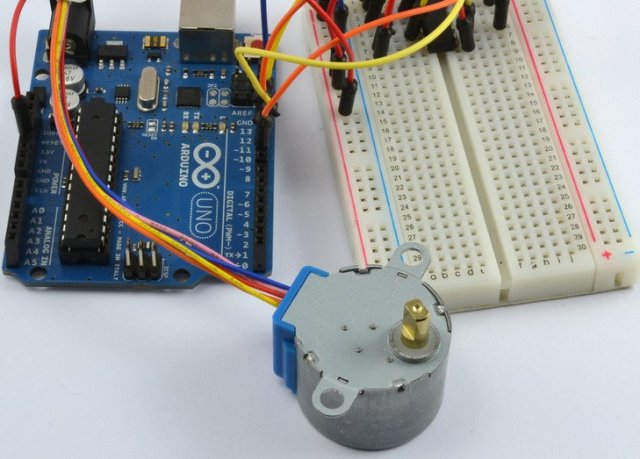
Подключение к Arduino драйвера и шагового двигателя
В большинстве случаев нужно использовать микроконтроллер в паре с драйвером для шагового двигателя. Давайте рассмотрим схему подключения и примеры программного кода. Рассмотрим подключение на базе последнего приведенного драйвера – ULN2003 к плате Arduino. И так у него есть 4 входа, они подписаны, как IN1, IN2 и т.д. Их нужно соединить с цифровыми пинам платы ардуино, а к драйверу подсоединить моторчик как показано на рисунке ниже.
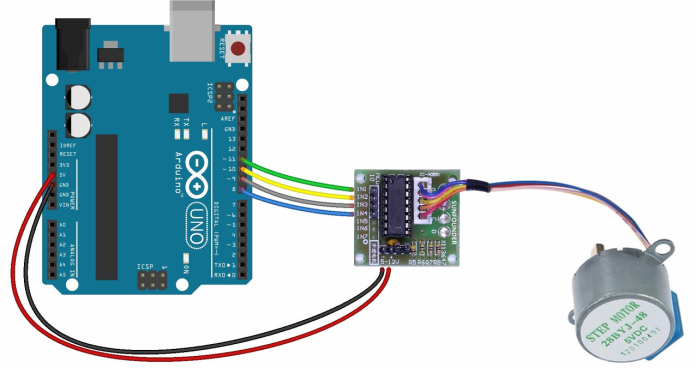
Далее в зависимости от способа управления вы должны подавать на входы 1 или 0 с этих пинов включая 1 или 2 обмотки в нужно последовательности. Код программы полношагового управления выглядит примерно так:
УПРАВЛЕНИЕ ШАГОВЫМ ДВИГАТЕЛЕМ
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.

Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
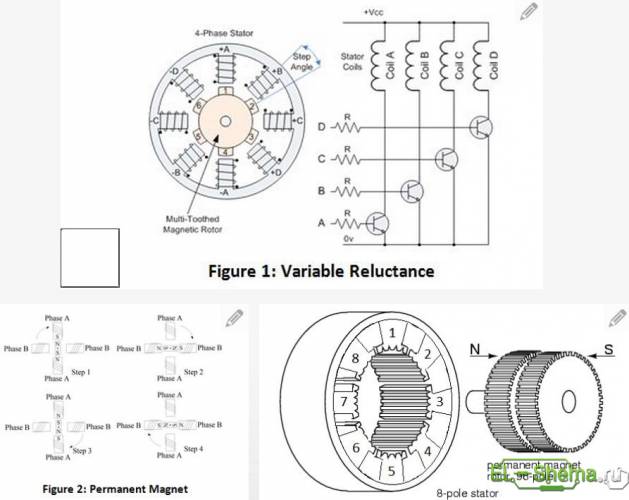
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
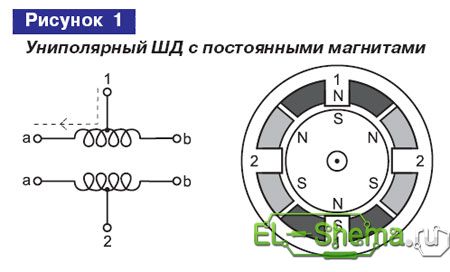
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
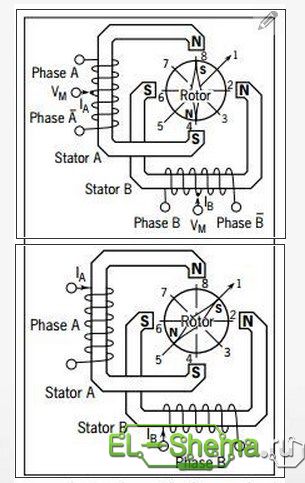
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Подключение шаговых двигателей
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
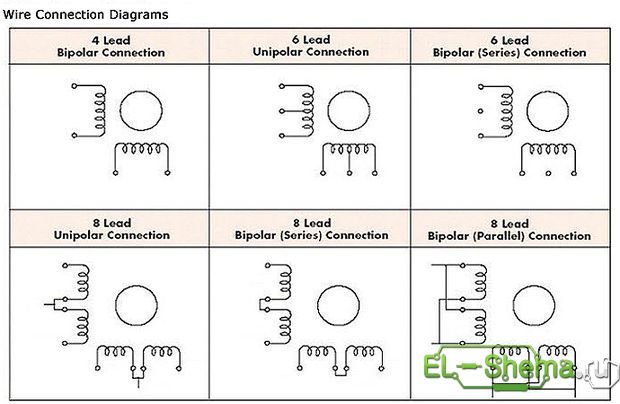
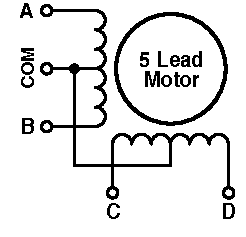
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
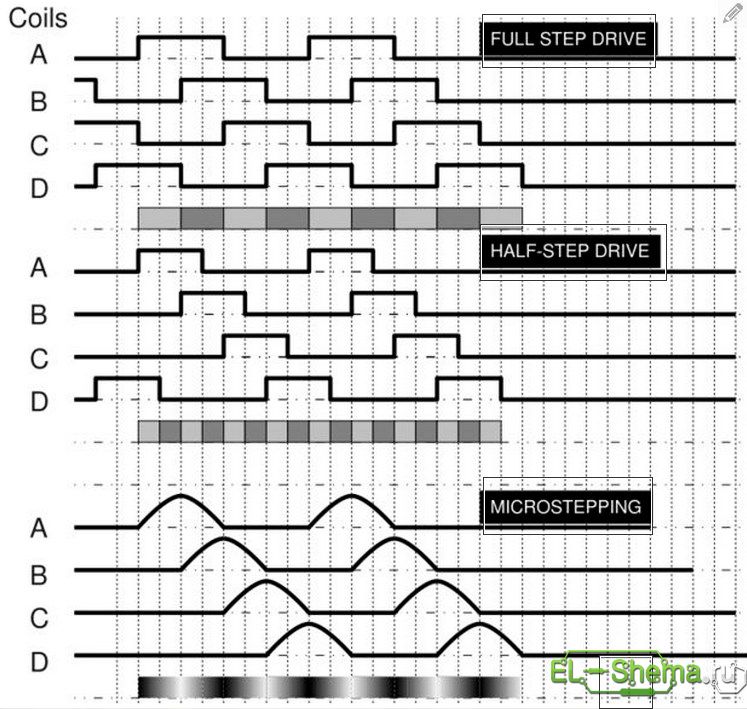
Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
Как подключить шаговый двигатель

КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.

В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером. Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.

