

Шаговый двигатель что это такое
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.

- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
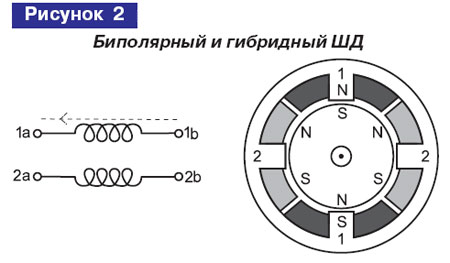
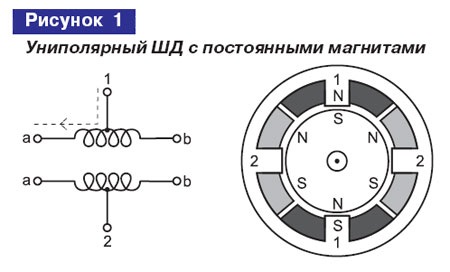
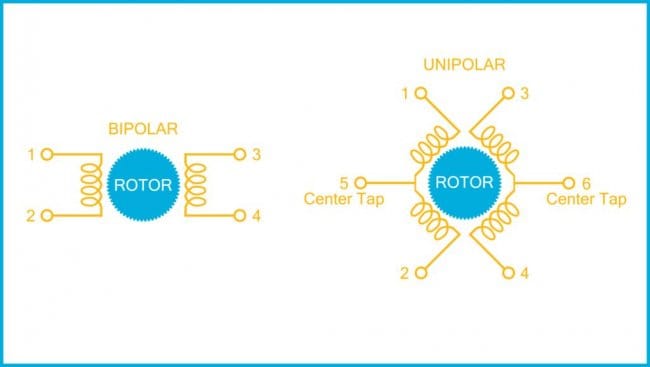
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
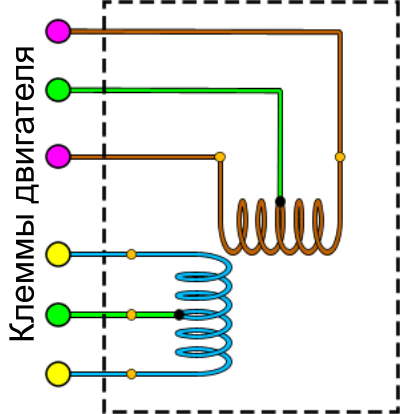
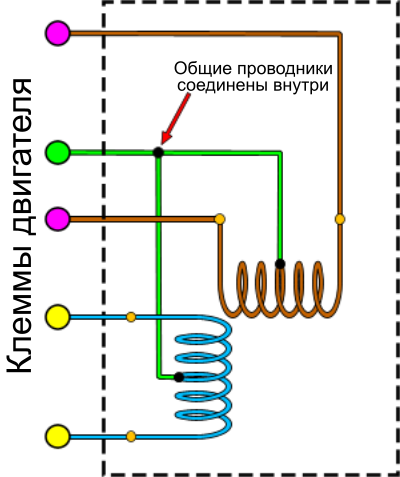
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим – ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим – ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим – ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.

Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.

Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.

Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.

Если подавать уровни не «0» – «½» – «1» (как на картинке), а «0» – «¼» – «½» – «¾» – «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления – доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.

Пример работы шаговых двигателей с разными видами роторов:

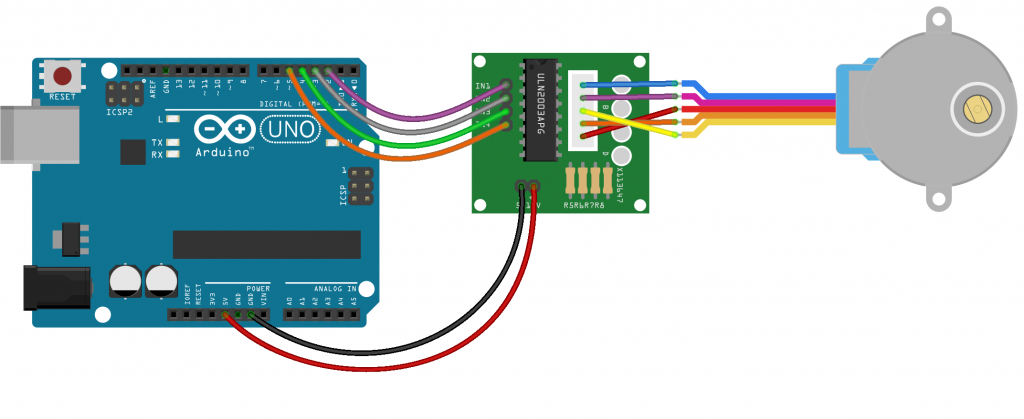
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Шаговый двигатель что это такое

Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
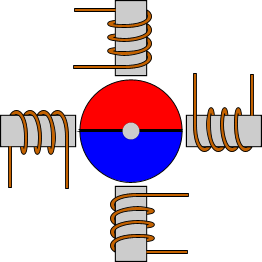
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
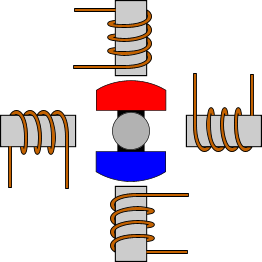
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
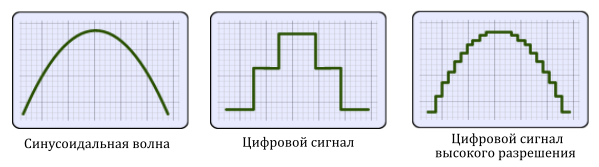 Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.

Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
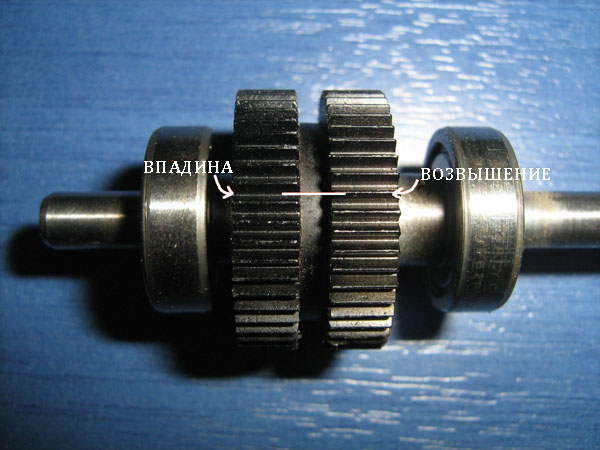
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
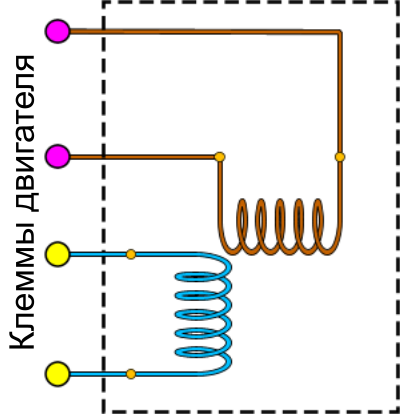
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Шаговый двигатель: что это такое и как он работает – принцип работы и устройство
Рассмотрим «сердце» фрезеровочных, шлифовальных, универсальных и многих других станков. Под прицелом внимания – шаговый двигатель: устройство и принцип работы, схема и сферы применения, типы конструкции и варианты программирования. Расскажем все эти и другие важные моменты, чтобы вы понимали, что он из себя представляет и какую его модель выбрать в соответствии со спецификой решаемых задач.
Сразу отметим, что предмет нашего интереса сегодня используется не только в сложном оборудовании, решающем ответственные задачи, но и в сравнительно простых производственных механизмах и даже в бытовых приборах. Он востребован во всех тех случаях, когда необходимо поддерживать достаточно скоростное вращение вала, одновременно сочетая его с точным позиционированием, и поэтому будет оставаться актуальным еще долгие годы.
Что такое шаговый двигатель
Согласно наиболее популярному определению, это машина, которая преобразует электрическую энергию (ее она получает из сети) в механическую осуществляя дискретные (внимание, не непрерывные, это важно) перемещения ротора. Причем после каждого такого действия положение динамической части фиксируется.
Все отдельные передвижения одинаковой величины, и вместе они формируют полный оборот (цикл). Поэтому, подсчитав их количество, можно без труда и с высокой точностью вычислить абсолютную позицию инструмента. Общее их число, кстати, зависит от ряда моментов: характер подключения, вид устройства, способ задания команд и другие факторы.
Принцип работы шагового электродвигателя
- На клеммы подается напряжение, благодаря которому специальные щетки начинают вращаться.
- Под воздействием входящих импульсов ротор устанавливается в начальное положение, а затем перемещается под одним и тем же углом.
- Микроконтроллер (в большинстве случаев, хотя возможна и другая внешняя цепь управления) приводит в действие зубчатые электромагниты. Тот из них, к которому прикладывают энергию, притягивает шестерню, обеспечивая тем самым поворот вала.
- Остальные магниты по умолчанию выровнены относительно ведущего, поэтому они сдвигаются вместе с ним по направлению к очередной детали.
- Шестеренка вращается за счет переключения электромагнитов по порядку – от главного к следующему и так далее. При этом она выравнивается относительно предыдущего колеса, что завершает цикл.
Шаг шагового двигателя – это описанный выше алгоритм, и он повторяется необходимое для выполнения технологической операции количество раз.
Представление о внешнем виде и характере функционирования дополнит следующий рисунок:
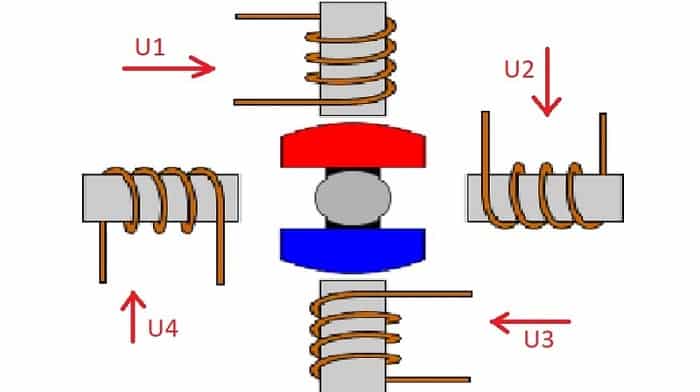
Из него ясно, что к статору относятся четыре обмотки, расположенные крестообразно, то есть под углом в 90 0 друг к другу. Отсюда понятно, что и дискретное движение будет осуществляться на такую же величину градусов. Если напряжение подавать поочередно – U1, U2, U3 и так далее – ротор сделает полный оборот, а затем пойдет на второй круг, то есть начнет вращаться – до тех пор, пока его не потребуется остановить. Ну а, чтобы изменить направление его движения, достаточно задействовать витки в обратном порядке.
Какие бывают шаговые двигатели: рассмотрим их разновидности
Режимы работы мотора определяют 2 характеристики: величина шага и усилие, прикладываемое для перемещения. Варьировать их можно, меняя метод подключения, строение обмоток или вала.
Соответственно, классификация приводов осуществляется по следующим параметрам:
- По конструкции ротора – его строение играет ключевую роль, так как от него зависит специфика взаимодействия с электромагнитным полем статора. Выделяют 3 варианта, причем каждый из них мы рассмотрим ниже, со всеми особенностями, плюсами и минусами.
- По виду (числу обмоток) – с ростом их количества вращение становится более плавным, но одновременно увеличивается и стоимость силового агрегата, хотя крутящий момент остается неизменным. Могут быть уни- и биполярными, в первом случае подключаются с ответвлением от средней точки, во втором – через 4 выхода.
Теперь обратим внимание на строение вала.
Шаговые приводы с переменным магнитным сопротивлением
Как следует хотя бы из названия, собственный источник постоянного поля у него отсутствует; кроме того, его ротор сделан из магнитомягкого материала и отличается зубчатой формой. Через ближайшие к статору участки контакта и осуществляется замыкание – с притяжением к полюсам, обеспечивающее дискретные движения. По своему исполнению он похож на шестерню, в которой сила вращения появляется за счет противоположных пар и попеременного протекания тока.
Ключевое преимущество – нет стопорящего момента, ведь поле, в других случаях способное воздействовать на арматуру, банально отсутствует. Вы получаете синхронный силовой агрегат, в котором ротор и статор поворачиваются одновременно и в унисон.
Обладая теми же размерами, что и другие разновидности, данные модели развивают меньший крутящий момент. Перемещение осуществляется на 5-15 градусов, а это сравнительно грубо и, зачастую, неточно. Так объясняется несколько ограниченная сфера применения реактивного шагового двигателя: где используется мотор данного типа, так в специфических станках, все детали которых производитель изготавливает самостоятельно.
С постоянными магнитами
Опять же, сразу ясно, в чем их особенность – в наличии собственного источника постоянного поля, являющегося основой подвижного элемента и содержащего 2 и более полюсов. Именно последние и обеспечивают вращение ротора за счет подачи напряжения на обмотки и притяжения/отталкивания.
Перемещение может осуществляться либо полностью перпендикулярно предыдущему положению, либо наполовину; увеличивая число магнитных пар, можно регулировать длину, а значит и количество дискретных движений, доводя их общее число до 48 за полный оборот. Это позволяет очень точно устанавливать рабочий инструмент в нужное место и является конкурентным преимуществом силового агрегата.
Гибридные
Конструкция шагового двигателя этого типа была разработана, чтобы объединить достоинства двух предыдущих. Представляет собой цилиндрический источник поля, намагниченный продольно, то есть пару полюсов с особенными поверхностями – с нанесенными зубцами. Последние обеспечивают отличное удерживание, не снижая крутящий момент.
- малый шаг – 0,9-50 – что позволяет прецизионное позиционирование за счет большого количества дискретных перемещений (до 400 за один цикл);
- высокая скорость и плавность работы.
Да, они дороже двух предыдущих видов, так как сложнее в изготовлении, но это относительный минус. Благодаря своим преимуществам это наиболее распространенные сегодня варианты, использующиеся в самых ответственных случаях: устанавливаются в ЧПУ-станках, в приборах современной робототехники, на медицинском и офисном оборудовании.
Принцип управления шаговым двигателем
Выделяют 3 основных режима, задаваемых драйвером, то есть чипом, посылающим сигналы. Вот они:
Каждый из них обладает своими особенностями. Первый из них мы уже косвенно описывали выше, и он сводится к поочередной коммутации фаз; причем только одна из них в любой из моментов может быть подключена к источнику – они не должны перекрывать друг друга. Этот закон отражен в английском названии метода – one phase – one step. Точки равновесия при этом обязаны совпадать с направлением полюсов статора.
Минус здесь в том, что одновременно задействована лишь половина обмоток (у биполярного агрегата) или даже четверть (у униполярного).
Также можно выбрать принцип работы шагового мотора, при котором питание будет подаваться сразу на все витки. Он известен как способ two-phase-on (full step), и при нем ротор остается в состоянии равновесия между силовыми линиями неподвижной части вала, причем смещенным на половину дискретного движения. Благодаря такому решению крутящий момент может быть повышен до 35-40%.
Полушаговый режим
На каждом втором перемещении задействована одна фаза, в то время как между ними – пара. Это дает возможность вдвое уменьшить величину угла и, следовательно, в 2 раза повысить количество переходов в течение оборота. Удобен именно тем, что сравнительно просто обеспечивает результат, поэтому достаточно распространен.
При таком устройстве и работе шагового электродвигателя важно помнить, что его остановка должна производиться с формированием тока удержания – небольшого, намного меньше номинального, но все равно необходимого и важного. Он нужен, чтобы автоматически фиксировать положение ротора после полного отключения напряжения. Иначе подвижный вал будет в свободном состоянии и при механическом воздействии (которое весьма вероятно) сместится, чего нельзя допустить. Зато при его подаче отпадает потребность в организации тормозной системы, добавлении механического фиксатора или другого элемента, способного стать «слабым звеном», то есть снизить общую надежность силового агрегата.
Микрошаговый режим
Рассмотрим, как в этом случае действует пошаговый двигатель: принцип работы сводится ко включению двух фаз с неравномерным распределением тока обмоток. Благодаря этому смещается магнитное поле статора, а вслед за ним и позиция ротора. Диспропорция между переключениями отличается маленькой дискретностью.
За счет такого подхода осуществляются крайне малые шаги – в 1/3 от полного или еще короче, числом до 1000 за оборот. Это позволяет максимизировать точность установки инструментов, хотя и значительно усложняет систему контроля. На практике данное решение востребовано в особо сложных и ответственных случаях, при создании и использовании сравнительно дорогих, но прецизионных станков.
Достоинства и недостатки
Мы уже рассмотрели, как устроен, работает, и где применяется шаговый двигатель, что это такое, но наше описание было бы неполным без анализа плюсов и минусов его стандартных моделей.
В списке объективных преимуществ:
- Поддержка полного крутящего момента при постепенном уменьшении скорости хода, даже перед остановкой.
- Точное позиционирование в рамках выбранного режима, причем без какой-либо обратной связи; количество дискретных перемещений задается углом поворота.
- Положение силового агрегата фиксируется сразу же в момент прекращения движения – ток удержания обеспечивает отсутствие инерционных сдвигов.
- Быстрый старт и реверс, оперативное переключение.
- Регулировать вращение можно прецизионно, возвратного влияния при этом, опять же, не наблюдается.
- Высокий уровень общей надежности, отчасти объясняется тем, что нет коллекторных щеток и других элементов, которые могли бы стать «слабым звеном».
В числе практических недостатков:
- Принцип действия шагового двигателя может сопровождаться чересчур сложным управлением.
- Скорость не очень-то высока номинально.
- Иногда возникает резонанс, что чревато сбоями в установке инструментов.
- Удельная мощность сравнительно мала.
- Под воздействием механических перегрузок возможна потеря позиционирования.
Очевидно, что плюсы значительнее минусов, к тому же, есть области, в которых без рассматриваемых силовых агрегатов просто не обойтись, когда они в разы превосходят коллекторные. Это те случаи точной механики, в которых нужно перемещать узлы с мгновенными остановками и быстрым изменением вектора движения.
Важные характеристики
- С точки зрения электротехники, пошаговый привод – это достаточно сложное устройство, обладающее целым рядом параметров. Вот основные из них:
- Число полных шагов в течение одного цикла – от него зависит точность, плавность хода, разрешающая способность; у современных моделей должно быть на уровне 200-400.
- Угол дискретного перемещения (поворота вала) – рассчитывается как 360 0/количество отдельных передвижений за оборот; аналогичный предыдущему показатель, просто представленный в другом виде; его актуальные значения – 1,8-0,9 градусов.
- Пробивное напряжение – максимальное, по достижении которого нарушается изоляция, определяет безопасность использования.
- Допустимое постоянное напряжение – измеряется в статическом режиме на витках; в ряде случаев не приводится, но и тогда его можно рассчитать по закону Ома.
- Номинальный ток – наибольший из возможных для безопасного и бесперебойного функционирования силового агрегата.
- Сопротивление обмотки – оно, вместе с предыдущей характеристикой, говорит о том, какое количество Вольт можно подавать на пошаговые электродвигатели.
- Индуктивность фазы – определяет скорость нарастания тока; приобретает особенно важную роль при быстром вращении вала.
- Сопротивление изоляции – между обмотками и корпусом.
Отдельным семейством параметров являются моменты:
- крутящий – зависит от частоты вращения; указывается максимальный для данного силового агрегата;
- инерции – чем он меньше, тем быстрее разгон;
- стопорный – нужен для прокручивания вала в случае отсутствия питания;
- удерживающий – активен при полной остановке и запитывании номинальным током двух фаз.
Подключение
Есть модели с 4, 5, 6, 8 соединителями; «четверка» подходит только для биполярных, так как у них пара фазных обмоток с двумя коннекторами и нужно устанавливать непрерывные связи. «Шестерка» обладает еще и центр-кранами на каждом витке и поэтому универсально применима ко всем силовым агрегатам.
Типичные варианты коммутации выглядят следующим образом:
Введение в устройство шаговых двигателей

Если вы когда-либо имели удовольствие демонтировать старый принтер, чтобы сохранить электронные компоненты, то можете столкнуться с множеством цилиндрических загадочных моторов с 4 или более проводами, выступающими из сторон. Возможно, вы слышали характерное жужжание настольного 3D-принтера или глючную электромеханическую симфонию дисков в CD приводе? Если так, то вы столкнулись с шаговым двигателем!
Шаговые двигатели заставляют электромеханический мир вращаться ( с более высоким крутящим моментом!), но в отличие от обычного двигателя постоянного тока, управление шаговым двигателем требует чуть больше, чем ток через два провода. В этой статье будет рассказано о теории проектирования и эксплуатации шагового двигателя. Как только рассмотрим основы, автор данного руководства покажет, как построить простые схемы для управления шаговыми двигателями, а затем как использовать специальные микросхемы драйверов.
Шаг 1: Что делает мотор шаговым двигателем?
Кому может понадобиться более двух проводов и Н-мост? Зачем? Ну, в отличие от обычных щеточных двигателей постоянного тока, построенных для максимального числа оборотов (или кВ для RC), шаговые двигатели представляют собой бесщеточные двигатели, рассчитанные на высокий крутящий момент (впоследствии меньшую скорость) и более точное вращательное движение. В то время как типичный двигатель постоянного тока отлично подходит для вращения гребного винта на высокой скорости для достижения максимальной тяги, шаговый двигатель лучше подходит для прокатки листа бумаги синхронно со струйным механизмом внутри принтера или для осторожного вращения вала линейного рельса в мельнице с ЧПУ.
Внутри шаговые двигатели являются более сложными, чем простой двигатель постоянного тока, с несколькими катушками вокруг сердечника с постоянными магнитами, но с этой дополнительной сложностью обеспечивается больший контроль. Благодаря тщательному расположению катушек, встроенных в статор, ротор шагового двигателя может вращаться с заданным шагом, изменяя полярность между катушками и переключая их полярность в соответствии с установленной схемой зажигания. Шаговые двигатели не все сделаны одинаковыми, и для их внутреннего исполнения требуются уникальные (но базовые) схемы. Обсудим наиболее распространенные типы шаговых двигателей на следующем шаге.
Шаг 2: Типы шаговых двигателей

Есть несколько различных конструкций шаговых двигателей. К ним относятся однополярное, биполярное, универсальное и переменное сопротивление. Мы будем обсуждать конструкцию и работу биполярных и однополярных двигателей, так как это наиболее распространенный тип двигателя.
У однополярных двигателей обычно есть пять, шесть или восемь проводных выводов, идущих от основания, и одна катушка на фазу. В случае пятипроводного двигателя пятый провод представляет собой соединенные центральные отводы пар катушек. В шестипроводном двигателе каждая пара катушек имеет собственный центральный отвод. В двигателе с восемью проводами каждая пара катушек полностью отделена от других, что позволяет подключать ее в различных конфигурациях. Эти дополнительные провода позволяют приводить в действие однополярные двигатели непосредственно от внешнего контроллера с простыми транзисторами, чтобы управлять каждой катушкой отдельно. Схема зажигания, в которой приводится в действие каждая катушка, определяет направление вращения вала двигателя. К сожалению, учитывая, что за один раз подается только одна катушка, удерживающий момент однополярного двигателя всегда будет меньше, чем у биполярного двигателя того же размера. Обойдя центральные отводы однополярного двигателя, он теперь может работать как биполярный двигатель, но для этого потребуется более сложная схема управления. На четвертом шаге этой статьи мы приведем в действие однополярный двигатель, который должен прояснить некоторые из представленных выше концепций.
Биполярные двигатели, как правило, имеют четыре провода и являются более прочными, чем однополярный двигатель сравнительного размера, но поскольку у нас есть только одна катушка на фазу, нам нужно повернуть ток через катушки, чтобы перейти на один шаг. Наша потребность изменить ток означает, что мы больше не сможем управлять катушками напрямую с помощью одного транзистора, вместо этого – полная цепь h-моста. Построение правильного h-моста утомительно (не говоря уже о двух!), Поэтому мы будем использовать выделенный драйвер биполярного двигателя (см. Шаг 5).
Шаг 3: Понимание спецификаций шагового двигателя
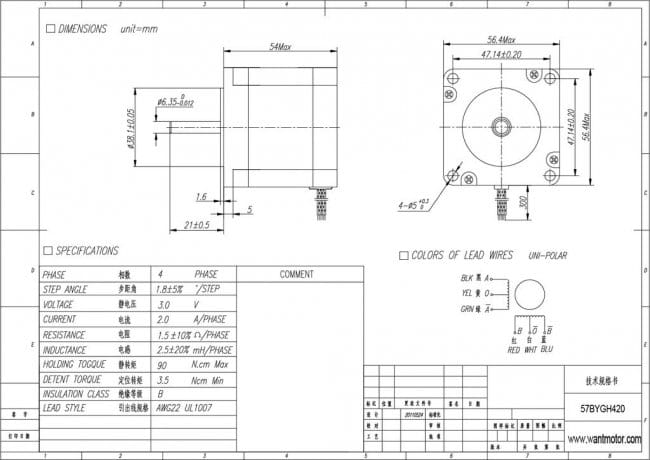
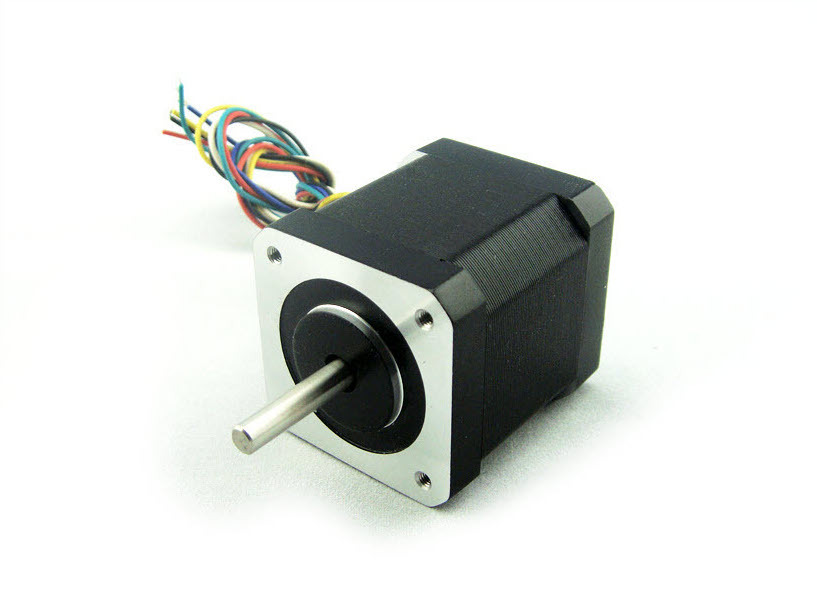
Давайте поговорим о том, как определить технические характеристики двигателя. Если вы встречали двигатель квадратного сечения с определенной сборкой из трех частей (см. Рисунок три), скорее всего, это двигатель NEMA. Национальная ассоциация производителей электрооборудования имеет определенный стандарт для спецификаций двигателя, использующий простой буквенный код для определения диаметра лицевой панели двигателя, типа крепления, длины, фазного тока, рабочей температуры, фазного напряжения, шагов на оборот и проводки.
Чтение паспорта двигателя
Для следующего шага будет использован этот однополярный мотор. Выше приложена таблица данных. И хотя она краткая, она предоставляет нам все, что нам нужно для правильной работы. Давайте разберем, что в списке:
Фаза: это четырехфазный однополярный мотор. Внутренне двигатель может иметь любое количество реальных катушек, но в этом случае они сгруппированы в четыре фазы, которые могут управляться независимо.
Шаг угла: При приблизительном разрешении 1,8 градусов на шаг мы получим 200 шагов на оборот. Хотя это является механическим разрешением, с помощью микроперехода мы можем увеличить это разрешение без каких-либо изменений двигателя (подробнее об этом в шаге 5).
Напряжение: номинальное напряжение этого двигателя составляет 3 вольта. Это функция тока и номинальных сопротивлений двигателя (закон Ома V = IR, следовательно, 3V = 2A * 1,5Ω)
Ток: сколько тока нужно этому двигателю? Два ампера на фазу! Эта цифра будет важна при выборе наших силовых транзисторов для базовой схемы управления.
Сопротивление: 1,5 Ом на фазу ограничит то, какой ток мы можем подать на каждую фазу.
Индуктивность: 2,5 мГн. Индуктивная природа катушек двигателя ограничивает скорость зарядки катушек.
Удерживающий момент: это то, сколько фактической силы мы можем создать, когда на шаговый двигатель подано напряжение.
Момент удержания: это то, какой момент удержания мы можем ожидать от двигателя, когда он не находится под напряжением.
Класс изоляции: класс B является частью стандарта NEMA и дает нам рейтинг в 130 градусов Цельсия. Шаговые двигатели не очень эффективны, и постоянное потребление максимального тока означает, что они будут сильно нагреваться при нормальной работе.
Показатели обмотки: диаметр провода 0,644 мм., количество витков в диаметре 15,5, сечение 0,326 мм2

