Классификация электродвигателей переменного тока
Классификация электродвигателей
В зависимости от назначения, от предполагаемых режимов и условий работы, от типа питания и т. д., все электродвигатели можно классифицировать по нескольким параметрам: по принципу получения рабочего момента, по способу работы, по роду тока питания, по способу управления фазами, по типу возбуждения и т. д. Давайте же рассмотрим классификацию электродвигателей более подробно.

Возникновение вращающего момента
Вращающий момент в электродвигателях может быть получен одним из двух способов: по принципу магнитного гистерезиса либо чисто магнитоэлектрически. Гистерезисный двигатель получает вращающий момент посредством явления гистерезиса во время перемагничивания магнитно-твердого ротора, в то время как у магнитоэлектрического двигателя вращающий момент является результатом взаимодействия явных магнитных полюсов ротора и статора.

Магнитоэлектрические двигатели по праву составляют сегодня львиную долю всего обилия электродвигателей, применяемых в очень многих областях. Они подразделяются по роду питающего тока на:
двигатели постоянного тока,
двигатели переменного тока,
В отличие от магнитоэлектрического двигателя, в гистерезисном двигателе допускается перемещение намагниченности ротора относительно его геометрических осей, и именно данная особенность не позволяет распространять на синхронный режим работы гистерезисного двигателя общие закономерности магнитоэлектрического преобразования.
Двигатели постоянного тока

У двигателя, который питается постоянным током, за переключение фаз отвечает сам двигатель. Это значит, что хотя на электрическую машину и подается постоянный ток, тем не менее, благодаря действию внутренних механизмов устройства, магнитное поле оказывается движущимся и становится в состоянии поддерживать вращающий момент ротора (как будто в обмотке статора действует переменный ток).
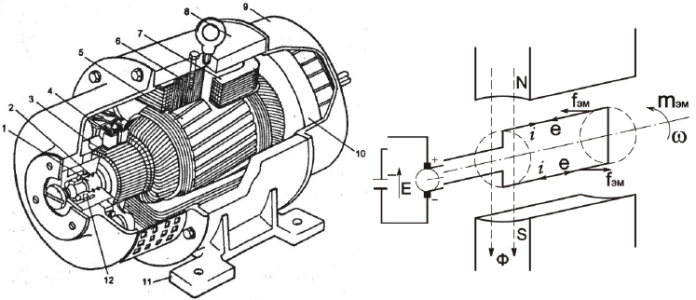
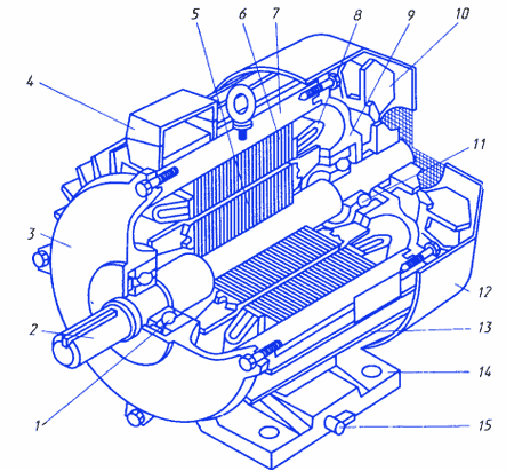
Устройство и приницип работы электродвигателя постоянного тока: 1 – якорь, 2 – вал, 3 – коллекторные пластины, 4 – щеточный узел, 5 – магнитопровод якоря, 6 – магнитопровод индуктора, 7 – обмотки возбуждения, 8 – корпус индуктора, 9 – боковые крышки, 10 – вентилятор, 11 – лапы, 12 – подшипники.
Электродвигатель постоянного тока состоит из неподвижной части, называемой индуктором, и подвижной части, называемой якорем. В зависимости от исполнения, место обмотки возбуждения на индукторе могут располагаться постоянные магниты, что позволяет упростить конструкцию, но не позволяет регулировать магнитный поток двигателя, влияющий на его скорость.
По способу создания движущегося магнитного поля, двигатели постоянного тока подразделяются на:
Бесколлекторные двигатели имеют в своей конструкции электронные инверторы, которые и осуществляют переключение фаз. Коллекторные же двигатели традиционно оснащены щеточно-коллекторными узлами, которые призваны чисто механически синхронизировать питание обмоток двигателя с вращением его движущихся частей.
Возбуждение коллекторных двигателей

Коллекторные двигатели по способу возбуждения бывают следующих видов: с независимым возбуждением от постоянных магнитов или от электромагнитов, либо с самовозбуждением. Двигатели с возбуждением от постоянных магнитов содержат магниты на роторе. Двигатели с самовозбуждением имеют на роторе специальную якорную обмотку, которая может быть включена параллельно, последовательно или смешано со специальной обмоткой возбуждения.
Двигатель пульсирующего тока
На двигатель постоянного тока похож двигатель пульсирующего тока. Отличие заключается в наличии шихтованных вставок на остове, а также дополнительных шихтованных полюсов. Кроме того, у двигателя пульсирующего тока имеется компенсационная обмотка. Применение такие двигатели находит в электровозах, где они обычно питается выпрямленным переменным током.
Двигатель переменного тока
Двигатели переменного тока, как ясно из названия, питаются током переменным. Бывают они синхронными и асинхронными.
У синхронных двигателей переменного тока магнитное поле статора движется с той же угловой скоростью, что и ротор, а у асинхронных всегда есть некое отставание (характеризующееся величиной скольжения s) — магнитное поле статора в своем движении как бы опережает ротор, который в свою очередь все время стремится его догнать.
Синхронные двигатели больших мощностей (мощностью в сотни киловатт) имеют на роторе обмотки возбуждения. Роторы менее мощных синхронных двигателей оснащены постоянными магнитами, которые и образуют полюса. Гистерезисные двигатели тоже в принципе относятся к синхронным.
Шаговые двигатели — это особая категория синхронных двигателей с высокой точностью управления скоростью вращения, вплоть до дискретного счета шагов.
Вентильные синхронные реактивные двигатели получают питание через инвертор. Смотрите по этой теме: Современные синхронные реактивные двигатели
Асинхронные двигатели переменного тока отличаются тем, что у них угловая скорость вращения ротора всегда меньше чем угловая скорость вращения магнитного поля статора. Асинхронные двигатели бывают однофазными (с пусковой обмоткой), двухфазными (к ним относится и конденсаторный двигатель), трехфазными и многофазными.
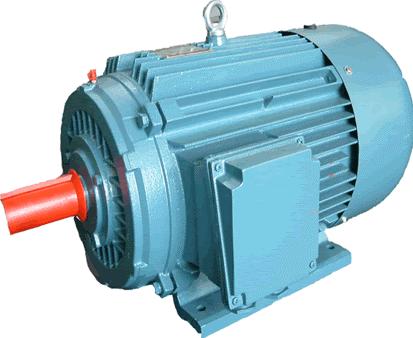
Конструкция трехфазного асинхронного электродвигателя с короткозамкнутым ротором
Асинхронный электродвигатель состоит и неподвижной (статора) части и подвижной (ротора) частей, которые удерживаются подшипниками 1 и 11, установленными в боковые крышки 3 и 9. Ротор состоит из вала 2, на котором закреплен магнитопровод 5 с обмоткой. Статор двигателя состоит из корпуса 7, к которому прикреплен магнитопровод 6. В пазы магнитопровода уложена трехфазная обмотка 8. Так же к корпусу крепится крышка клеммной коробки 4 и защитный кожух 12 крыльчатки 10.
Фазный ротор имеет трехфазную обмотку, выполненную по типу обмотки статора. Одни концы катушек соединены в нулевую точку («звезда»), а другие – подключены к контактным кольцам. На кольца наложены щетки, осуществляющие скользящий контакт с обмоткой ротора. При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора.
Асинхронный двигатель с частотным преобразователем для плавного регулирования скороcти вращения вала за счет изменения частоты и питающего напряжения:

Универсальные коллекторные двигатели
Универсальный коллекторнй двигатель может работать хоть от постоянного, хоть от переменного тока (50 Гц). Имеет последовательное возбуждение, используется в бытовых электроприборах , где требуется скорость вращения более высокая чем максимальные для обычных двигателей переменного тока 3000 об/мин. Как правило, мощность таких двигателей не превышает 200 Вт. Встречается тиристорное управление скоростью вращения универсального двигателя.
Усовершенствованная разновидность универсального двигателя — синхронный двигатель с датчиком положения ротора, где роль коллектора выполняет электронный инвертор.
Электродвигатели
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является – электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор – неподвижная часть, ротор – вращающаяся часть.

У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Принцип работы электродвигателя




- Подробное описание принципа работы электродвигателей разных типов:
- Принцип работы однофазного асинхронного электродвигателя
- Принцип работы трехфазного асинхронного электродвигателя
- Принцип работы синхронного электродвигателя
Классификация электродвигателей
- Универсальный
- Репульсионный
- КДПТ с обмоткой возбуждения
- Включение обмотки
- Независимое
- Последовательное возбуждения
- Параллельное
- Комбинированное
- БДПТ
(Бесколлекторный двигатель + ЭП |+ ДПР) - ВРД
(Реактивный двигатель с ротором с явновыраженными полюсами и сосредоточенной обмоткой статора + ЭП |+ ДПР)
- Трехфазный
(многофазный)- АДКР
- АДФР
- Двухфазный
(конденсаторный) - Однофазный
- с пусковой обмоткой
- с экранированными полюсами
- с асимметричным магнитопроводом
- СДОВ
- СДПМ
- СДПМВ
- СДПМП
- Гибридный
- СРД
- Гистерезисный
- Индукторный
- Гибридный СРД-ПМ
- Реактивно-гистерезисный
- Шаговый 5
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, – датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока – электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ – коллекторный двигатель постоянного тока
- БДПТ – бесколлекторный двигатель постоянного тока
- ЭП – электрический преобразователь
- ДПР – датчик положения ротора
- ВРД – вентильный реактивный двигатель
- АДКР – асинхронный двигатель с короткозамкнутым ротором
- АДФР – асинхронный двигатель с фазным ротором
- СДОВ – синхронный двигатель с обмоткой возбуждения
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина – вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.

Универсальный электродвигатель

Коллекторный электродвигатель постоянного тока
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина – вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].

Асинхронный электродвигатель

Cинхронный электродвигатель
Специальные электродвигатели

Серводвигатель
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
 ,
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
 ,
,
- где Pном – номинальная мощность двигателя, Вт,
- nном – номинальная частота вращения, мин -1 [4]
Начальный пусковой момент – момент электродвигателя при пуске.
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя – это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность – физическая величина, показывающая какую работу механизм совершает в единицу времени.
 ,
,
- где P – мощность, Вт,
- A – работа, Дж,
- t – время, с
Работа – скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].
 ,
,
Для вращательного движения
 ,
,
- где

 – угол, рад,
– угол, рад,
 ,
,
- где
 – углавая скорость, рад/с,
– углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя – характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
 ,
,
- где
 – коэффициент полезного действия электродвигателя,
– коэффициент полезного действия электродвигателя, - P1 – подведенная мощность (электрическая), Вт,
- P2 – полезная мощность (механическая), Вт
- При этом потери в электродвигатели обусловлены:
- электрическими потерями – в виде тепла в результате нагрева проводников с током;
- магнитными потерями – потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями – потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями – потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

Частота вращения

- где n – частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции – скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
 ,
,
- где J – момент инерции, кг∙м 2 ,
- m – масса, кг
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (кг∙м 2 )
Момент инерции связан с моментом силы следующим соотношением
 ,
,
- где
 – угловое ускорение, с -2 [2]
– угловое ускорение, с -2 [2]
 ,
,
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) – напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
- где
 – постоянная времени, с
– постоянная времени, с
Механическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.
Классификация электродвигателей переменного тока

В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.
Простой двигатель имеет 2 положения ротора (2 “мёртвые точки”), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).

Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные – электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.

Бесколекторные – замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.

Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).
Синхронный – двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.

Асинхронный – двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин – индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.

Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.

Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.

Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.

Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.

Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.

Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.
Двигатель переменного тока
В данной статье расскажем про двигатели переменного тока, их главное отличие от двигателей постоянного тока. Рассмотрим классификацию таких двигателей и подробно разберем области применения различных двигателей переменного тока.
Вступление
Мы все знаем, что без электричества мы не можем выполнять свою работу. Если мы посмотрим на мир, в котором мы живем, то основное развитие технологий и цивилизации произошло только после введения электричества и электрических устройств. Можем ли мы представить себе жизнь без кондиционеров / потолочных вентиляторов, светильников, компьютеров и устройств связи и многого другого.
Поэтому совершенно очевидно, что электричество и электрооборудование играют жизненно важную роль в каждом дюйме нашей жизни. Одним из таких устройств, которое создало гигантский скачок для человечества как в бытовом, так и в промышленном секторах, является «Мотор». Использование двигателей переменного тока намного более распространено, чем двигателей постоянного тока, по нескольким практическим причинам, которые мы узнаем позже.

Двигатели переменного тока играют очень важную роль в повседневной жизни, начиная от перекачивания воды в верхний резервуар и заканчивая маневренным рычагом современного робота. Основным фактором, который приводит к принятию и широкому использованию в различных областях, является его гибкость и его огромное разнообразие, которое может соответствовать практически любому спросу. Чтобы узнать, какие существуют различные типы двигателей ACM, которые идеально соответствуют их потребностям, крайне важно знать о различных классификациях двигателей ACM.
Типы двигателей переменного тока
Классификация основана на принципе действия.
- Классификация на основе принципа действия :
(а) Синхронные двигатели.
- С обмоткой возбуждения;
- С постоянными магнитами;
- Реактивный;
- Гистерезисный;
- Шаговый.
(б) Асинхронные двигатели.
- Индукционные двигатели;
- Коммутирующие двигатели.
- Классификация на основе типа тока:
- Однофазный;
- Двухфазный;
- Трехфазный.
- Классификация на основе скорости работы:
- Постоянная скорость;
- Переменная скорость;
- регулируемая скорость.
- Классификация на основе структурных особенностей:
- Открытый;
- Закрытый;
- Полузакрытый;
- Вентилируемый.
Описание электро двигателей переменного тока
1. Синхронные двигатели и их использование : эти двигатели имеют ротор (который подключен к нагрузке), вращающийся с той же скоростью, что и скорость вращения тока статора. Другими словами, мы можем сказать, что эти двигатели не имеют скольжения по току статора. Иногда они используются не для управления нагрузкой, а вместо этого действуют как «синхронный конденсатор», чтобы улучшить коэффициент мощности локальной сети, к которой она подключена. Эти типы двигателей используются даже в высокоточных устройствах позиционирования, таких как современные роботы. Они также могут действовать как шаговые двигатели.

2. Асинхронные двигатели и их применение. Эти типы двигателей, как правило, используются в повседневной жизни, от перекачивания воды через верхний резервуар до питательных насосов котлов электростанции. Эти двигатели очень гибки в использовании и соответствуют нагрузке практически на все.
Асинхронные двигатели очень важны для многих отраслей промышленности благодаря их несущей способности и гибкости. Эти двигатели, в отличие от синхронных двигателей, проскальзывают по сравнению с полем тока статора. Они обычно используются для различных типов насосов , компрессоров и действуют как главные двигатели для многих машин.

3. Однофазные и трехфазные двигатели и их использование. Двигатели переменного тока могут найти применение в двух формах в зависимости от источника питания. Однофазные двигатели, как правило, находят свое применение в требованиях с низким энергопотреблением / бытовых приборах, таких как потолочные вентиляторы, измельчители смесителей, переносные электроинструменты и т.д. Трехфазные двигатели, как правило, используются для высоких требований к мощности, таких как силовые приводы для компрессоров , гидравлических насосов, систем кондиционирования воздуха, ирригационные насосы и многое другое.

4. Двигатели с постоянной, переменной и регулируемой скоростью. Как уже говорилось, двигатели переменного тока очень гибки во многих отношениях, включая управление скоростью. Существуют двигатели, которые должны работать с постоянной скоростью для воздушных компрессоров. Определенные насосы охлаждения воды, приводимые в действие электродвигателями, могут работать на двух или трех скоростях, просто переключая количество используемых полюсов. Если число полюсов изменяется, скорость также изменяется. Они лучше всего подходят для насосов охлаждения морской воды в морских машинных отделениях и на многих электростанциях. Скорость двигателей также может непрерывно изменяться некоторыми электронными устройствами, таким образом, это может подходить для определенных применений, таких как судовой грузовой насос, скорость разгрузки которого должна быть снижена в соответствии с требованием терминалов.
5. Двигатели с изменяемой структурой . Эти типы двигателей имеют различную компоновку внешней клетки, в зависимости от использования или каких-либо специальных промышленных требований. Для двигателей, используемых в газовых и масляных клеммах, корпус должен быть «искробезопасным», поэтому он может иметь закрытый корпус или вентилируемое трубопроводное устройство, чтобы искры, возникающие внутри двигателя, не вызывали возгорания снаружи. Также многие двигатели полностью закрыты, так как они могут быть уязвимыми для погодных условий, как те, которые используются на гидроэлектростанциях.