

Как подключить двигатель постоянного тока
Методы запуска электродвигателя постоянного тока
Запуск электродвигателя постоянного тока отчасти отличается от запуска других видов электродвигателей. Разница заключается в том, что, в отличие от других типов двигателей, электродвигатель постоянного тока имеет очень большое значение пускового тока, которое, если его заранее не ограничить, потенциально может привести к повреждению внутренней цепи обмотки якоря электродвигателя.
Ограничение пускового тока можно осуществить с помощью стартера. Таким образом, отличительной чертой методов запуска электродвигателя постоянного тока является тот факт, что стартер может поспособствовать ограничению его пускового тока. Это соединённый последовательно к обмотке якоря прибор с переменным сопротивлением, который, учитывая аспект обеспечения безопасности электродвигателя постоянного тока, может быть использован целью ограничения его пускового тока до желаемого оптимального уровня.
Теперь вопрос звучит непосредственно: почему у электродвигателя постоянного тока такое большое значение пускового тока?
Чтобы ответить на данный вопрос нужно принять во внимание исходное рабочее напряжения для электродвигателя постоянного тока, которое задано следующим уравнением:
где Е – напряжение питания, Ia – ток в обмотке якоря электродвигателя, а Ra – сопротивление якорной обмотки. Eb — противоэдс.
Теперь значение противоэлектродвижущей силы электродвигателя постоянного тока очень похоже на значение электродвижной силы генератора постоянного тока, сгенерированной вращательным движением токонесущего якорного проводника при наличии тока возбуждения.
Противоэлектродвижущая сила электродвигателя постоянного тока задается следующим уравнением:
и она играет основную роль при запуске электродвигателя постоянного тока.
Из данного уравнения мы видим, что Eb прямопропорциональный скорости электродвигателя N. Так как исходное значение N = 0, значение Eb также равно НУЛЮ, и при данном обстоятельстве уравнение напряжения преобразуется следующим образом:
При всех практических попыток достижения оптимального режима работы двигателя, показатель сопротивления якорной обмотки сохраняется очень маленьким, порядка 0.5 Ω, а абсолютный минимум напряжения питания составляет 200 вольт. Даже при таких условиях пусковой ток (Ia) может достичь вплоть до 220/0.5 А = 440 А.
Такой большой показатель пускового тока электродвигателя постоянного тока создает две основные проблемы:
- ток в порядке 440 ампер потенциально может привести к повреждению внутренней цепи обмотки якоря электродвигателя при самом начале его запуска;
- согласно уравнению для вращающегося момента электродвигателя постоянного тока, где
очень большое значение электромагнитного пускового тока электродвигателя создается посредством большого пускового тока, который потенциально может выработать большую центробежную силу, из-за которой роторная обмотка двигателя может легко слететь из пазов.
 Схема метода запуска двигателя постоянного тока
Схема метода запуска двигателя постоянного тока
Методы запуска электродвигателя постоянного тока
Прямым следствием двух вышеупомянутых фактов (большой пусковой ток и большой пусковой вращающий момент электродвигателя пускового тока) может быть то, что, вся двигательная система подвергнется тотальной неупорядоченности, что в свою очередь приведёт к инженерному разгрому и нефункциональности. Чтобы не допустить такой инцидент, было придумано несколько методов запуска электродвигателя постоянного тока. Главным принципом здесь является добавление к якорной обмотки двигателя сопротивления по внешней цепи (Rext), с целью увеличения сопротивления по переменному току (Ra + Rext), чтобы ограничить ток в обмотке якоря к предельно допустимому значению. Новое значение пускового тока в обмотке якоря стало желательно низким, выходя из следующего уравнения:
Теперь, когда двигатель продолжает работать и увеличивать скорость, то противоэлектродвижущая сила тоже последовательно развивается и увеличивается, оказывая противодействие напряжению питания, в итоге снижая рабочее напряжение в сети. Таким образом, получается следующее уравнение:
Теперь, чтобы удержать предельно допустимое значение тока обмотки якоря, нужно постепенно уменьшать показатель Rext , пока он не дойдет до нуля, и все это при максимальной противоэлектродвижущей силе. При запуске электродвигателя постоянного тока, стартер способствует регулированию сопротивления по внешней цепи.
Стартеры бывают разных видов и принцип их работы очень сложен, и нуждается в объяснении. Вкратце, основные виды стартеров, используемые в промышленности, можно изобразить следующим образом:
- стартер с 3 зажимами;
- стартер с 4 зажимами (используется для запуска электродвигателя шунтового возбуждения и двигателя постоянного тока смешанного возбуждения);
- стартер двигателя постоянного тока серийного возбуждения без катушки сброса нагрузки.
 Схема: стартер с 3 зажимами (L, F, A)
Схема: стартер с 3 зажимами (L, F, A)  Схема: стартер с 4 зажимами (L, N, F, A)
Схема: стартер с 4 зажимами (L, N, F, A)
Все они играют очень важную роль при ограничении пускового тока электродвигателя, чтобы обеспечить надежный запуск и эксплуатацию самого двигателя.
Подключение двигателя постоянного тока
Клеммник двигателя постоянного тока ЭП-110/245 У3 1Р44 (110В;250Вт) промаркирован в следующей последовательности +Ш1, +Я1, -Я2, -Ш2.Какая схема возбуждения этого двигателя: параллельная,последовательная, или независимая?Как его подключить?
Вот фото

zabj написал :
Клеммник двигателя постоянного тока ЭП-110/245 У3 1Р44 (110В;250Вт) промаркирован в следующей последовательности +Ш1, +Я1, -Я2, -Ш2.Какая схема возбуждения этого двигателя: параллельная,последовательная, или независимая?Как его подключить?
Вот фото
Фото конечно “прекрасно” читаемо. 
- Подавать на Ш1-Ш2 110v постоянно.
- Затем подавать 110v на Я1-Я2.
- Для смены направления вращения менять полярность на Я1-Я2.
- Для смены направления вращения менять полярность на Я1-Я2.
Либо на Ш1-Ш2 
- Подавать на Ш1-Ш2 110v постоянно.
- Затем подавать 110v на Я1-Я2.
А если подать сразу на Ш1-Ш2 и Я1-Я2 по 110v ,то чё,пыхнет?
ksiman написал :
Либо на Ш1-Ш2 
да ну её, эту дугу.
А если подать сразу на Ш1-Ш2 и Я1-Я2 по 110v ,то чё,пыхнет?
Не пыхнет. Варианты разные. Может не стартануть.
Но сначала лучше подать возбуждение и только затем напряжение на якорную обмотку.
А пусковой ток как-то ограничивать собираетесь?
bu написал :
 да ну её, эту дугу
да ну её, эту дугу
Можно поподробней плиз?
А пусковой ток как-то ограничивать собираетесь?
Не собирался,но предложения буду рад выслушать.
bu написал :
да ну её, эту дугу.
Ну так всё отключить, затем перекидывать
zabj написал :
Не собирался,но предложения буду рад выслушать.
Подавать можно одновременно, но пусковой якорный ток лучше чем-либо ограничить
zabj написал :
Не собирался,но предложения буду рад выслушать.
У ЭП-110/245 номинальный ток 3,3 ампера, сопротивление якоря Rя=1,09 Ом.
При прямом включении на 110 вольт ток якоря в начальный момент Iя = Uя/Rя = 110/1.09 = 100.91 ампер.
Кратковременно конечно, и по мере разгона ток будет падать, но я бы на своем личном двигателе не стал рисковать.
Хотя, если автомат будет соответствующего номинала, то при каждой попытке пуска его будет выбивать.
bu ,
ksiman , Спасибо!Судя по вашим ответам ,-это двигатель с независимым типом возбуждения,поделитесь как это определяется плиз?
Охохох.
Курс электрических машин тяжело в рамках форума излагать.
Никак это не определяется. Всё зависит от того, как подключать обмотку возбуждения и якоря. Соединишь последовательно – будет двигатель последовательного возбуждения, соединишь параллельно – параллельного. Запитаешь обмотку возбуждения от регулируемого источника – будет независимого возбуждения.
По поводу пусковых токов – в инструкции к нему должны быть приведены условия пуска.
А что на валу сидит у него?
Юджин написал :
Охохох.
Курс электрических машин тяжело в рамках форума излагать.
Никак это не определяется. Всё зависит от того, как подключать обмотку возбуждения и якоря. Соединишь последовательно – будет двигатель последовательного возбуждения, соединишь параллельно – параллельного. Запитаешь обмотку возбуждения от регулируемого источника – будет независимого возбуждения.
Во как! Значит я заблуждался
Значит я заблуждался . но благодарю вас за разьяснения.
. но благодарю вас за разьяснения.
zabj
Про этот двигатель .
Юджин написал :
Охохох.
Курс электрических машин тяжело в рамках форума излагать.
Никак это не определяется. Всё зависит от того, как подключать обмотку возбуждения и якоря. Соединишь последовательно – будет двигатель последовательного возбуждения, соединишь параллельно – параллельного. Запитаешь обмотку возбуждения от регулируемого источника – будет независимого возбуждения.
По поводу пусковых токов – в инструкции к нему должны быть приведены условия пуска.
А что на валу сидит у него?
Ну я не сказал бы так однозначно. 
Независимое возбуждение – питание обмотки возбуждения от независимого источника. Т.е. регулирование напряжения на якоре и формирование напряжения на возбуждения не зависят друг от друга. Возможности регулирования полные: U, Ф, R.
У двигателей параллельного возбуждения обмотка якоря и обмотка возбуждения включены параллельно, что подразумевает их питание от одного источника. Возможности регулирования ограничены изменением сопротивления якорной цепи (R) и/или сопротивления цепи возбуждения (Ф).
Последовательное возбуждение это особая “песня”. Двигатель однозначно должен иметь такое исполнение. Т.к. подразумевает формирование магнитного потока в функции тока якоря.
Для двигателя эп-110/245 – нереализуемо в принципе.
Сопротивление обмотки возбуждения Rв=680 Ом. Если включить последовательно с Rя=1.09 Ом, то двигатель под нагрузкой не тронется с места, а если запустить на хх, то будет “падать” в режим кз при приложении нагрузки. 
Подключение электродвигателя постоянного тока
Несмотря на то, что электродвигатели постоянного тока не так популярны, как устройства, работающие на переменном токе, сфера их применения довольно широка: они используются в быту, в качестве элементов различного наземного транспорта, а также на предприятиях в приводах элементов, бесперебойное электроснабжение которых осуществляется аккумуляторными батареями. Именно поэтому на сайте торгового дома Степмотор представлен широкий ассортимент устройств такого типа. Отличительной особенностью электродвигателей постоянного тока является наличие обмоток возбуждения, при этом от того, каким образом они будут подключены к сети, напрямую зависят пусковые характеристики, механические и электрические свойства двигателя.
Схемы подключения электродвигателя постоянного тока
В зависимости от требуемых выходных характеристик электродвигателя постоянного тока, его подключение может быть осуществлено по одной из принципиальных схем: подключение с независимым, последовательным, параллельным или смешанным типом возбуждения. Схематическое изображение типов подключения электродвигателя постоянного тока представлено на иллюстрации, при этом каждый из типов подключения привносит свои особенности в эксплуатацию механизма.
Подключение с независимым возбуждением
При использовании такой схемы подключения обмотка возбуждения подключается напрямую к независимому источнику. При использовании такой схемы подключения общие характеристики электродвигателя станут идентичны двигателю, работающему на постоянных магнитах. Регулировка скорости вращения осуществляется с помощью сопротивления, возникающего в якорной цепи, или же при помощи реостата – регулировочного сопротивления в цепи обмотки возбуждения. При этом следует отметить, что при регулировке реостатом важно следить за величиной сопротивления в цепи обмотки: при сильном уменьшении этого значения (а также при обрыве) токи якоря резко возрастают, достигая опасных величин. При использовании для подключения схемы независимого возбуждения запрещается запуск электродвигателя на холостом ходу или при дефиците валовой нагрузки: такие действие неминуемо приведут к резкому увеличению скорости вращения и повреждению механизма.
Подключение с параллельным возбуждением
При использовании такого типа подключения подключение обмоток ротора и возбуждение происходит параллельно, к единому источнику питания. Таким образом, при включении электродвигателя в сеть на ротор подаётся большее количество тока, чем на обмотку возбуждения, благодаря чему выходные характеристики параллельно подключённого двигателя постоянного тока позволяют использовать их в приводах станков и прочего промышленного оборудования. Скорость вращения регулируется реостатами в цепи ротора.
Подключение с последовательным возбуждением
При использовании такого типа подключения якорная обмотка и обмотка возбуждения используют один ток, а их включение осуществляется попеременно. Скорость и нагрузка в двигателе постоянного тока, подключённом по последовательной схеме, прямо пропорциональны друг другу. Запуск на холостом ходу запрещён. Благодаря хорошим пусковым характеристикам, обеспечиваемым подключением с последовательным возбуждением, двигатели постоянного тока, подключённые по такой схеме, широко применяются в электротранспорте.
Подключение со смешанным возбуждением
Применение схемы смешанного возбуждения при подключении электродвигателя постоянного тока используются две попарно расположенные на полюсах двигателя обмотки возбуждения. Здесь существуют два варианта подключения: потоки будут либо складываться, либо вычитаться. В первом случае особенности работы электродвигателя будут аналогичны подключению по схеме последовательного возбуждения, во втором – параллельного.
Схемы электродвигателей постоянного тока и их характеристики
 Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
1. с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ,
2. с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря,
3. с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря,
4. со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая — последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов .
Электродвигатель постоянного тока с независимым возбуждением
В этом электродвигателе (рис. 1, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения — к вспомогательному источнику в напряжением UB. В цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rn.
Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой — для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. Зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными (рис. 2, а). Следовательно, линейной будет и механическая характеристика двигателя — зависимость п (М) (рис. 2, б).
При отсутствии в цепи якоря реостата с сопротивлением Rn скоростная и механическая характеристики будут жесткими, т. е. с малым углом наклона к горизонтальной оси, так как падение напряжения IяΣRя в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3—5 % от Uном. Эти характеристики (прямые 1 на рис. 2, а и б) называются естественными. При включении в цепь якоря реостата с сопротивлением Rn угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2, 3 и 4, соответствующих различным значениям Rn1, Rn2 и Rn3.
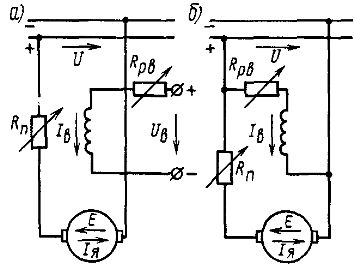
Рис. 1. Принципиальные схемы электродвигателей постоянного тока с независимым (а) и параллельным (б) возбуждением
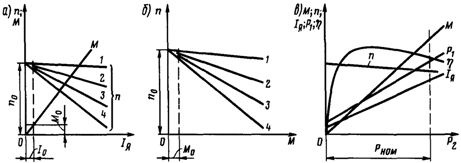
Рис. 2. Характеристики электродвигателей постоянного тока с независимым и параллельным возбуждением : а — скоростные и моментная, б — механические, в — рабочие Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат Rpв позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. При этом будет изменяться и частота вращения n.
В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря Iя и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания.
Резкое увеличение частоты вращения при обрыве цепи обмотки возбуждения объясняется тем, что в этом случае резко уменьшаются магнитный поток Ф (до значения потока Фост от остаточного магнетизма) и э. д. с. Е и возрастает ток Iя. А так как приложенное напряжение U остается неизменным, то частота вращения n будет увеличиваться до тех пор, пока э. д. с. Е не достигнет значения, приблизительно равного U (что необходимо для равновесного состояния электрической цепи якоря, при котором E= U — IяΣRя.
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток Iя, и машина должна быть отключена от источника питания.
Следует отметить, что частота вращения n0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I0, необходимый для компенсации внутренних потерь мощности, и развивает некоторый момент M0, требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше n0.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р2 (рис. 2, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря Iя и мощности Р1 от Р2 также практически линейны. Ток Iя и мощность Р1 при Р2 = 0 представляют собой ток холостого хода I0 и мощность Р0, потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин.
Электродвигатель постоянного тока с параллельным возбуждением
В этом электродвигателе (см. рис. 1, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат Rpв, а в цепь обмотки якоря — пусковой реостат Rп.
В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения Iв и магнитного потока Ф, что приводит к увеличению тока обмотки якоря Iя. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель постоянного тока с последовательным возбуждением
Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп (рис. 3, а), а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв.
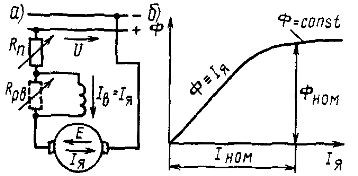
Рис. 3. Принципиальная схема электродвигателя постоянного тока с последовательным возбуждением (а) и зависимость его магнитного потока Ф от тока Iя в обмотке якоря (б)
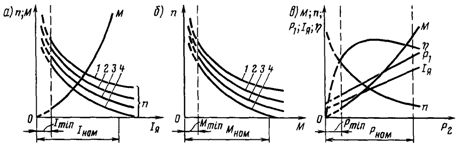
Рис. 4. Характеристики электродвигателя постоянного тока с последовательным возбуждением: а — скоростные и моментная, б — механические, в — рабочие.
Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rpв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 3, б).
При токе обмотки якоря Iя, меньшем (0,8—0,9) номинального тока Iном магнитная система машины не насыщена и можно считать, что магнитный поток Ф изменяется прямо пропорционально току Iя. Поэтому скоростная характеристика электродвигателя будет мягкая — с увеличением тока Iя частота вращения n будет резко уменьшаться (рис. 4, а). Уменьшение частоты вращения n, происходит из-за увеличения падения напряжения IяΣRя. во внутреннем сопротивлении Rя. цепи обмотки якоря, а также из-за увеличения магнитного потока Ф.
Электромагнитный момент М при увеличении тока Iя будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току Iя. Поэтому при токе Iя, меньшем (0,8 Н- 0,9) Iном, скоростная характеристика имеет форму гиперболы, а моментная — параболы.
При токах Iя > Iном зависимости М и п от Iя линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока Iя меняться не будет.
Механическая характеристика, т. е. зависимость n от М (рис. 4, б), может быть построена на основании зависимостей n и М от Iя. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением Rп получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям Rn1, Rn2 и Rn3, при этом чем больше Rn, тем ниже располагается характеристика.
Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).
Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2 …. 0,25) Iном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой), применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.).
Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением, поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением — только в 2 раза больше.
В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Зависимости n и М от мощности Р2 на валу электродвигателя (рис. 4, в), как следует из рассмотренных выше положений, являются нелинейными, зависимости P1, Iя и η от Р2 имеют такую же форму, как и у двигателей с параллельным возбуждением.
Электродвигатель постоянного тока со смешанным возбуждением
В этом электродвигателе (рис. 5, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя

где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя, Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 5, б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2 (кривая 4 при малой м. д. с. параллельной обмотки).
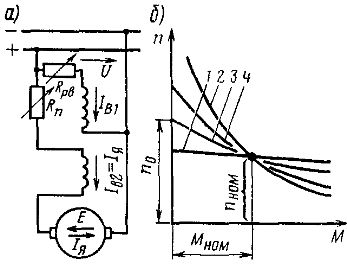
Рис. 5. Принципиальная схема электродвигателя со смешанным возбуждением (а) и его механические характеристики (б)
Достоинством двигателя постоянного тока со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл=0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).

